Project informatie
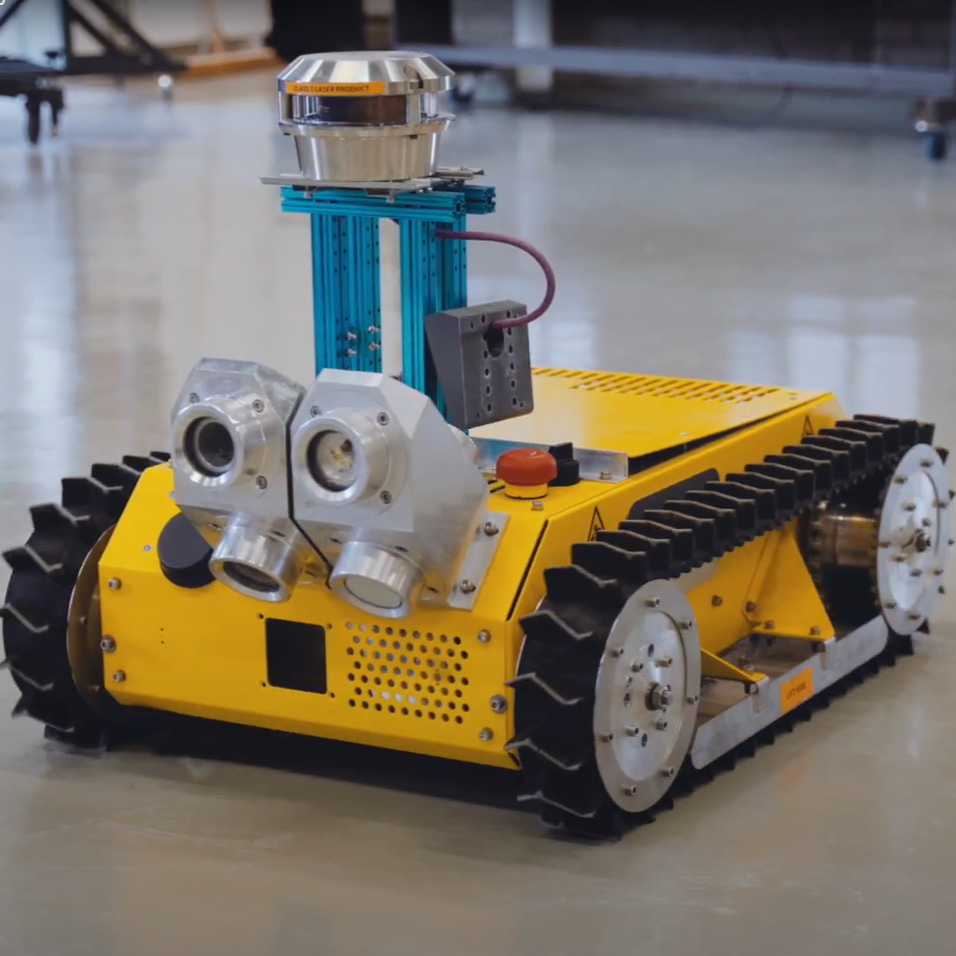
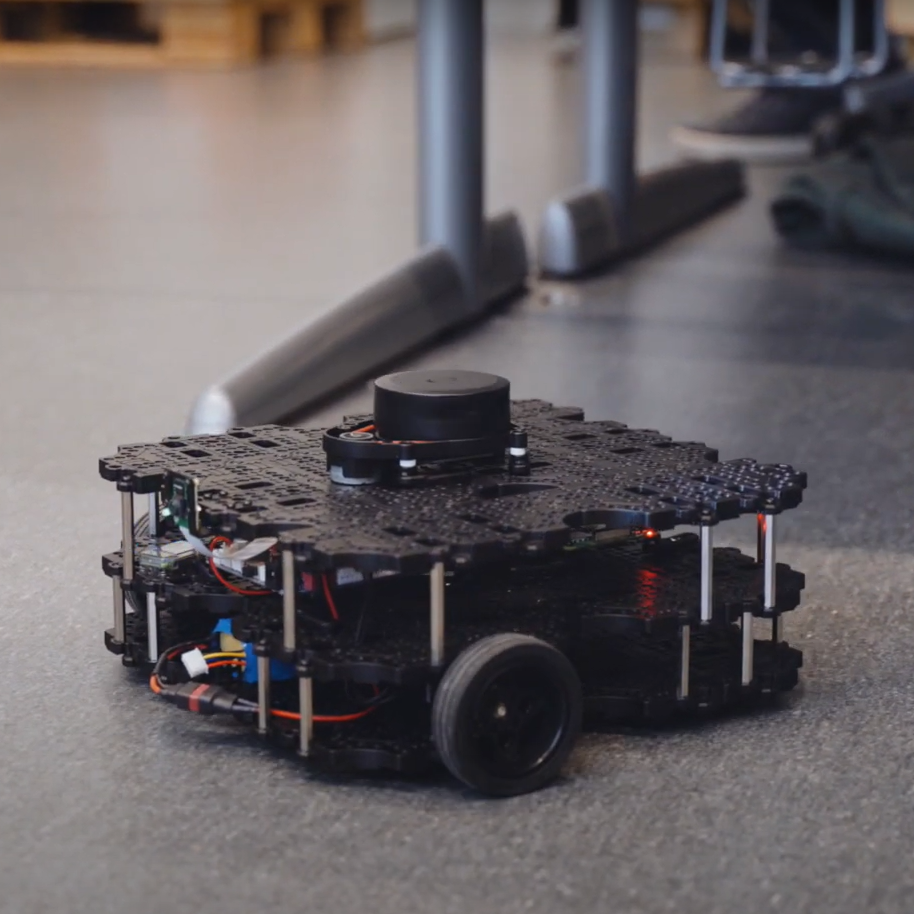
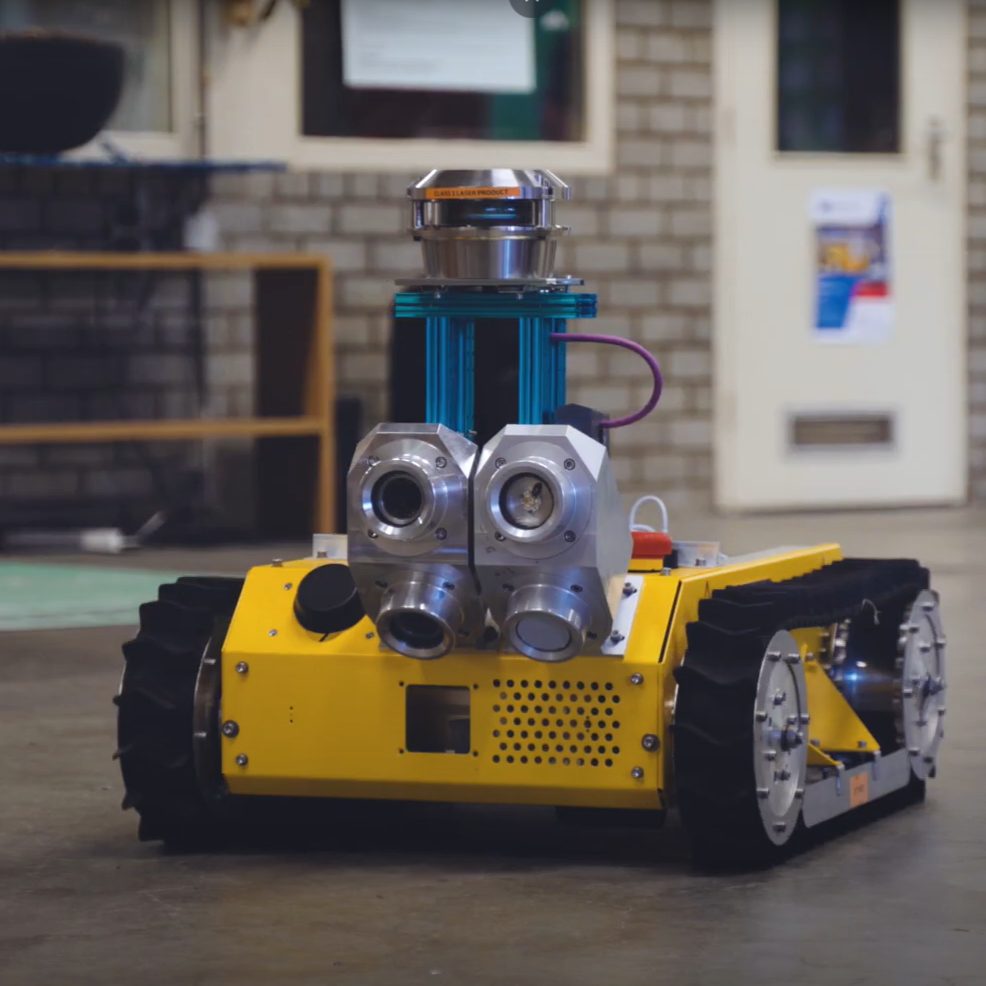
In dit minorproject gingen studenten aan de slag met het ontwikkelen van een autonoom voertuig dat zelfstandig landbouwtaken kan uitvoeren. De toepassing van Ackermann-sturing zorgt voor een realistische en wendbare rijervaring, vergelijkbaar met die van een auto. Het doel was om een autonome werktuigdrager te ontwerpen voor kleinschalige, biologische boeren, met toepassingen zoals zaaien, schoffelen of bemesten – allemaal zonder menselijke tussenkomst.
Wat is er gerealiseerd?
De studenten hebben een bijna volledig functionele autonome werktuigdrager ontwikkeld. Het voertuig maakt gebruik van sensoren en slimme software om zelfstandig zijn weg te vinden en landbouwtaken uit te voeren. Hoewel GPS-integratie nog ontbreekt, vormt het huidige resultaat een solide basis waarop een volgende minorgroep verder kan bouwen. Een krachtige stap richting de landbouw van de toekomst!
Wat hebben ze geleerd?
De projectgroep heeft geleerd hoe autonome voertuigen kunnen worden ingezet binnen de landbouwsector. Ze hebben ervaring opgedaan met voertuigbesturing, sensortechnologie, softwareontwikkeling en systeemintegratie. Daarnaast hebben ze inzicht gekregen in de uitdagingen van precisielandbouw en hoe technologie kan bijdragen aan duurzame en efficiënte voedselproductie.