Projectinformatie
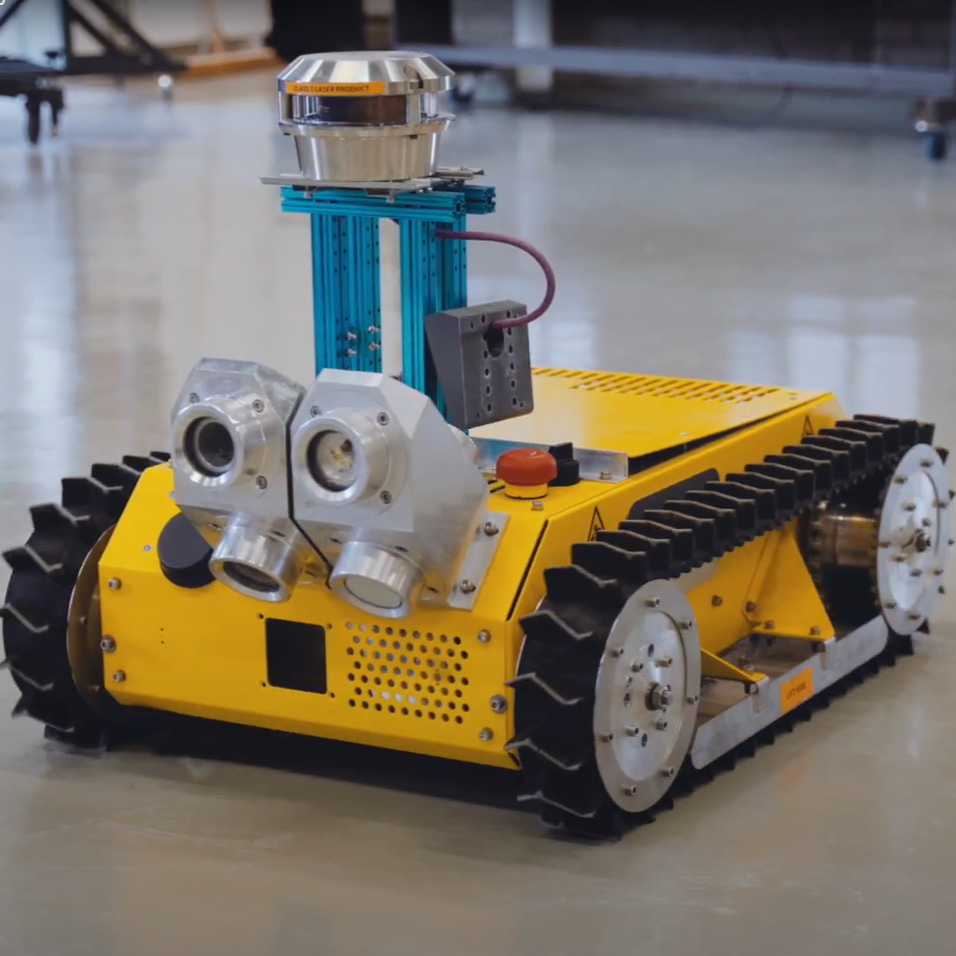
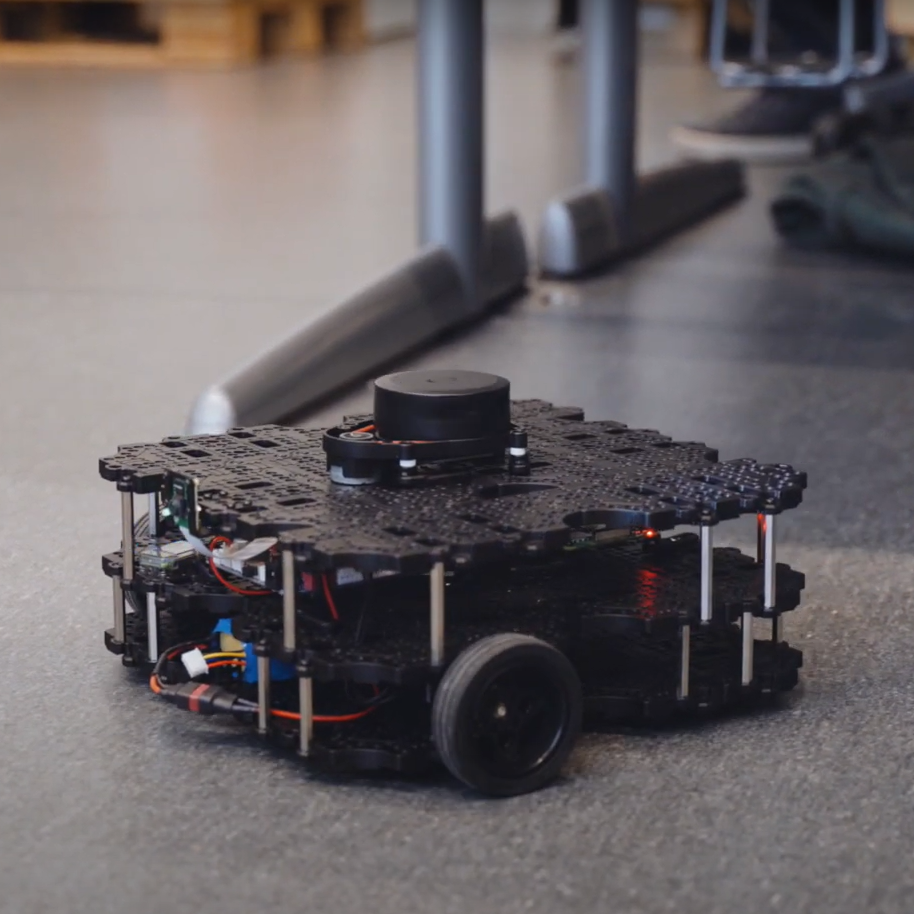
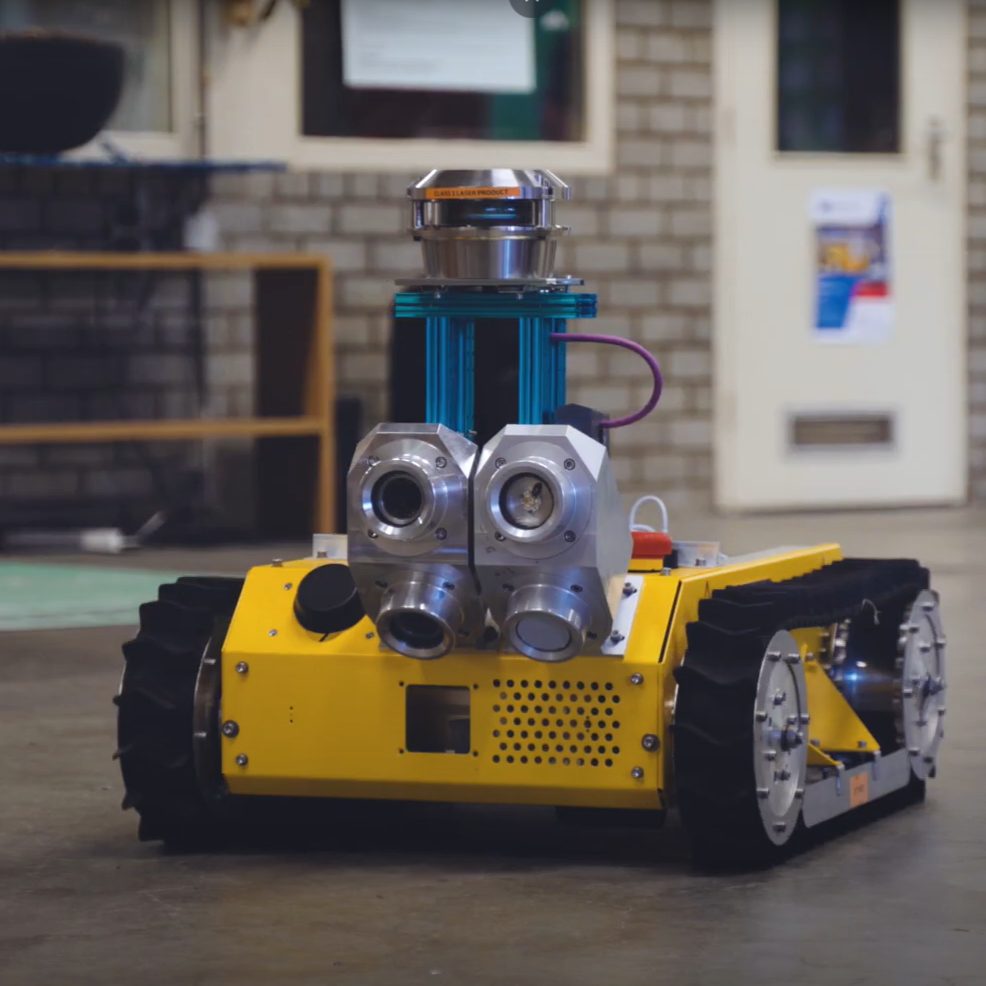
Dit project is in opdracht van het Lectoraat van Avans Hogeschool toevertrouwd aan de studenten. De opdracht is het autonoom laten rijden van de bestaande Avular Origin One (een bestaand platform) naar een specifiek punt in een gewasrij, zonder daarbij schade aan de gewassen aan te richten.
Wat is er gerealiseerd?
Binnen dit project heeft het projectteam verschillende doelstellingen gerealiseerd. Allereerst nam het team de verantwoordelijkheid voor het schrijven van de software die de robot autonoom door het veld kan laten bewegen. De engineeringcyclus is hierbij toegepast, waarbij het analyseren, ontwerpen, realiseren en testen van de robot centraal staat. Daarbij kozen de studenten ook specifieke hardware, namelijk een camera. Ze schreven software voor autonoom rijden, het plannen van de route en het corrigeren van de robot om schade aan de gewassen te voorkomen.
Wat is er geleerd?
Het projectteam heeft ervaring opgedaan in multidisciplinaire samenwerking. Aanvankelijk was er een rolverdeling, maar het ontbrak aan concrete taken. Uiteindelijk kreeg de groep het advies om meer structuur in de taken aan te brengen, wat het project aanzienlijk efficiënter maakte. Hierdoor werden waardevolle lessen geleerd over projectmanagement en het belang van duidelijke taakverdeling in een multidisciplinair team.