Project informatie
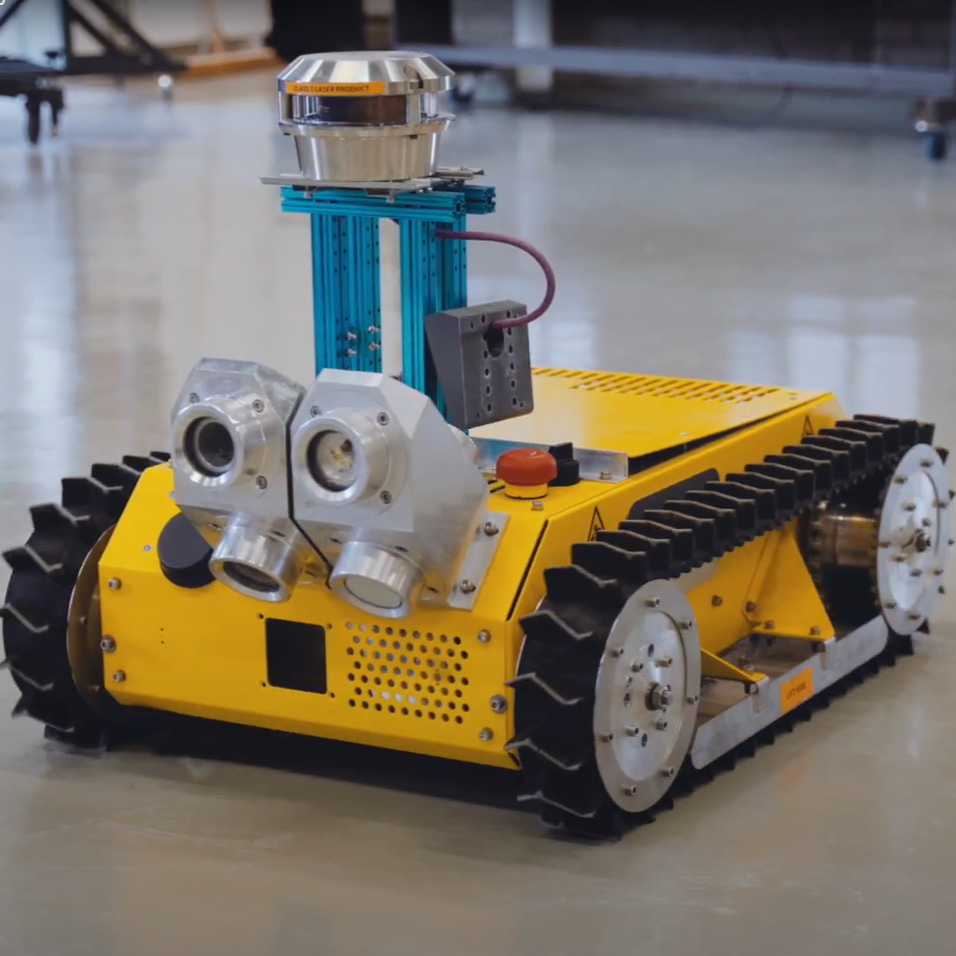
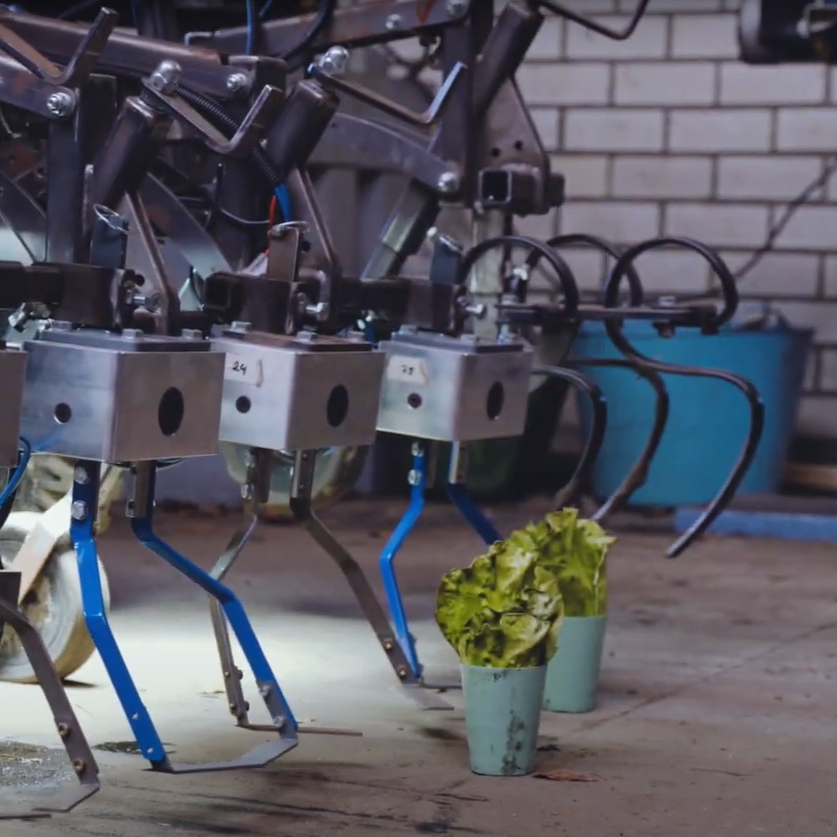
Binnen dit project is een robot ontwikkeld om autonoom noten, groenten en vruchten van de grond op te rapen in een voedselbos. Dit is een arbeidsintensieve klus waar arbeidscapaciteit een bottleneck is. Door dit werk door een autonoom navigerende robot uit te laten voeren wordt dit probleem verholpen.
Wat is er gerealiseerd?
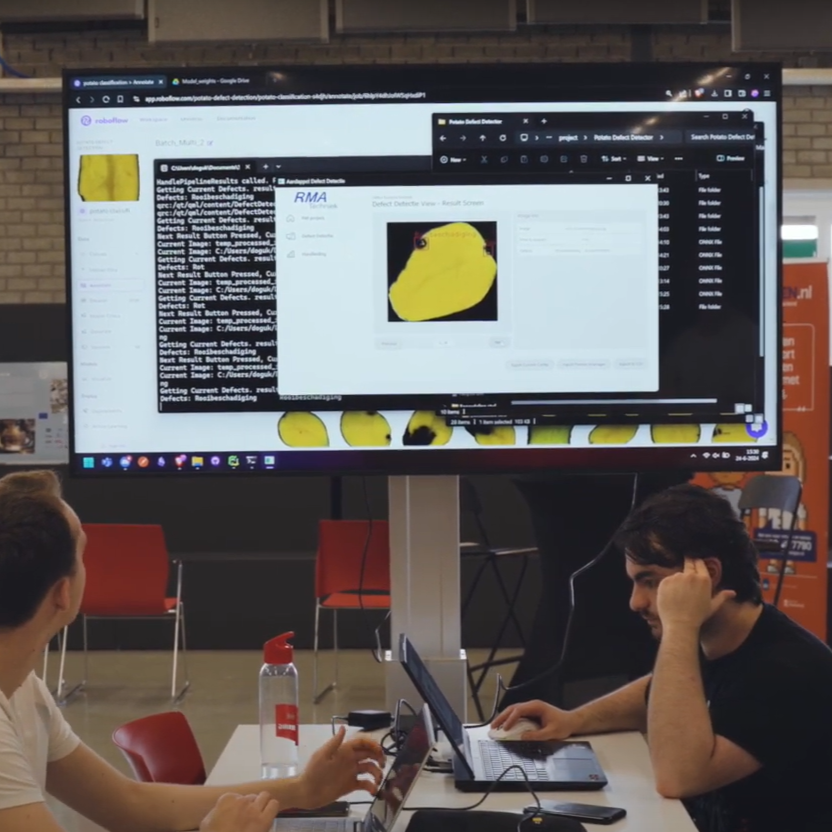
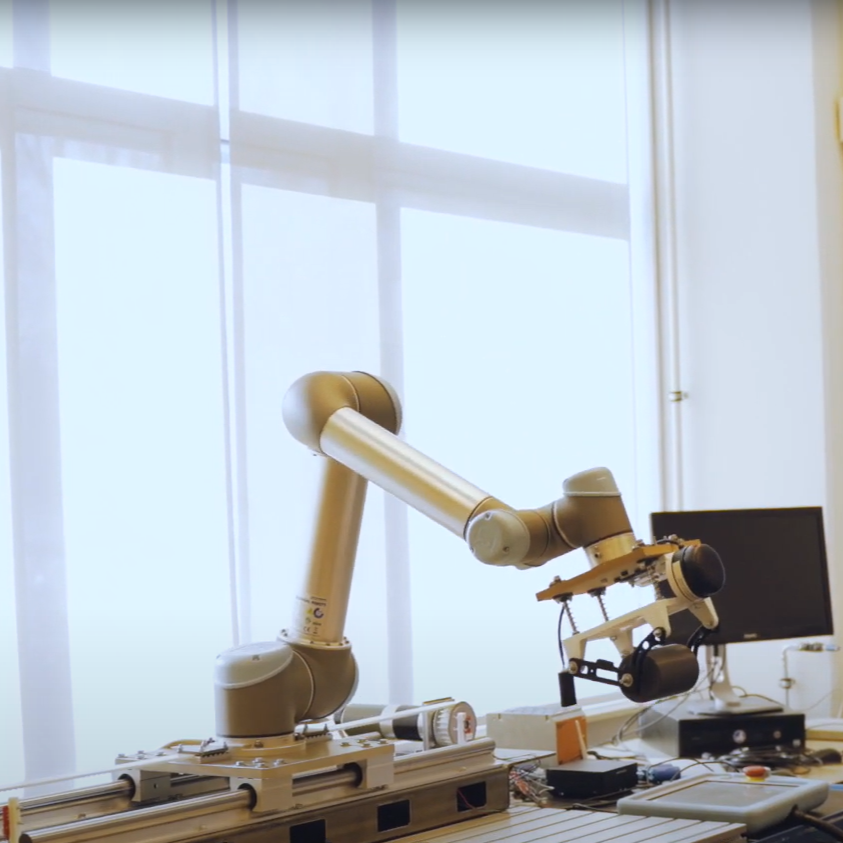
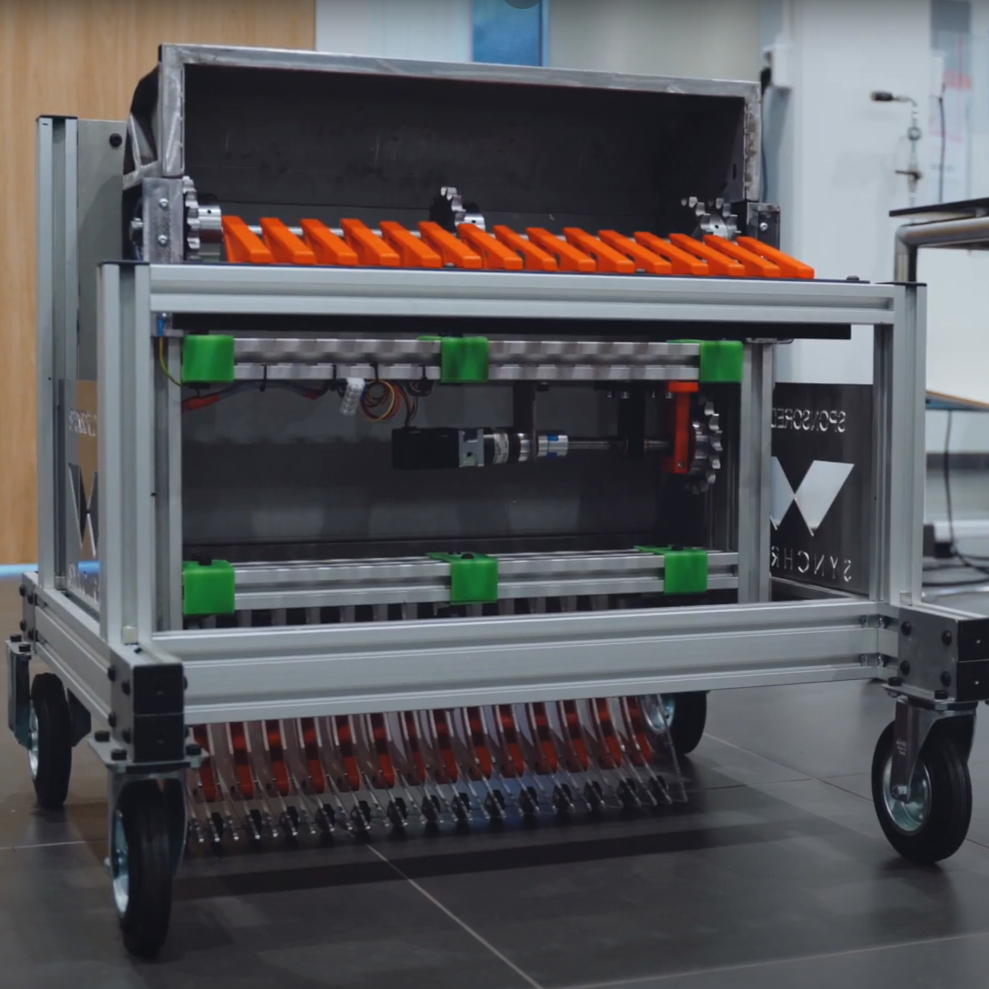
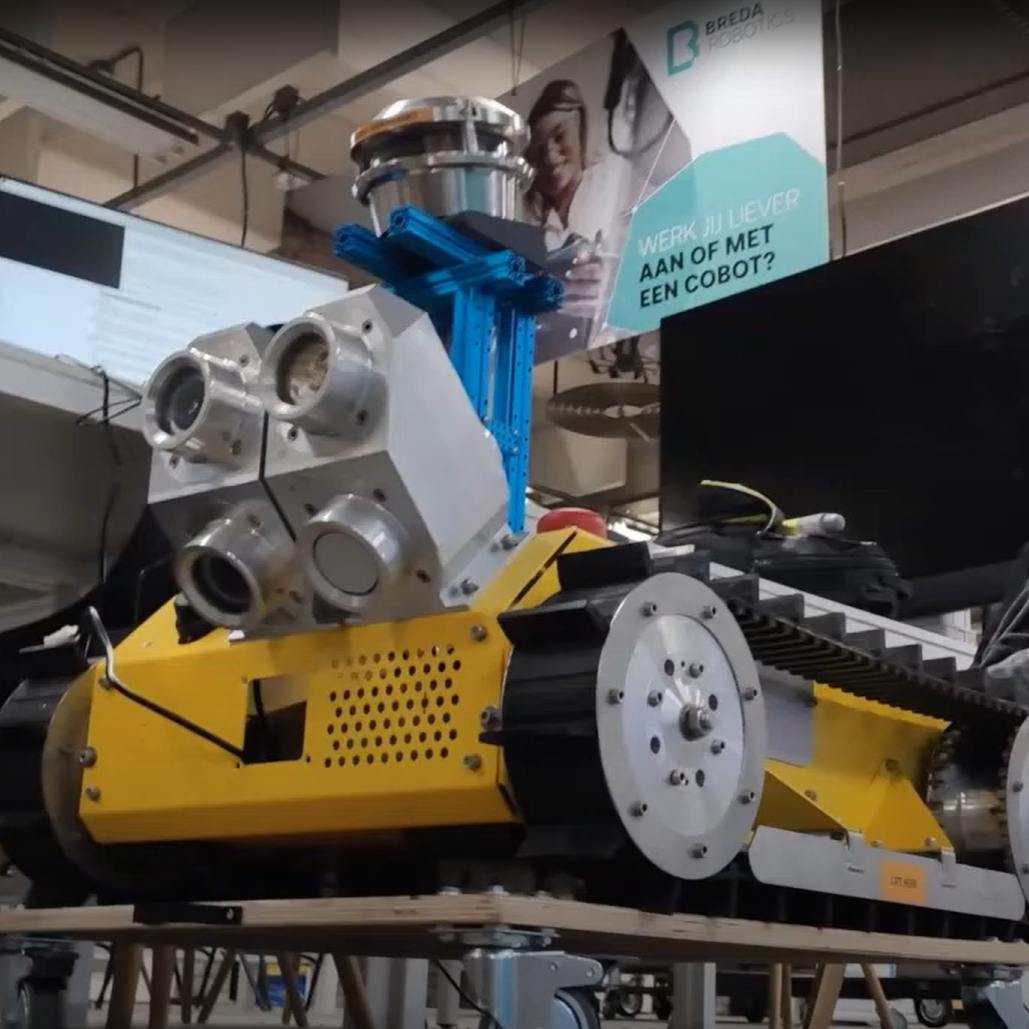
Binnen het project is een noten raap systeem gerealiseerd dat is gemonteerd op een bestaand onderstel. Hierbij kan de robot op afstand met een controller worden aangestuurd om door de boomgaard te navigeren. In het ontwerp zijn verschillende sensoren en camera’s gebruikt om de robot door te boombaard te laten navigeren. De volgende stap is de robot autonoom te laten navigeren.
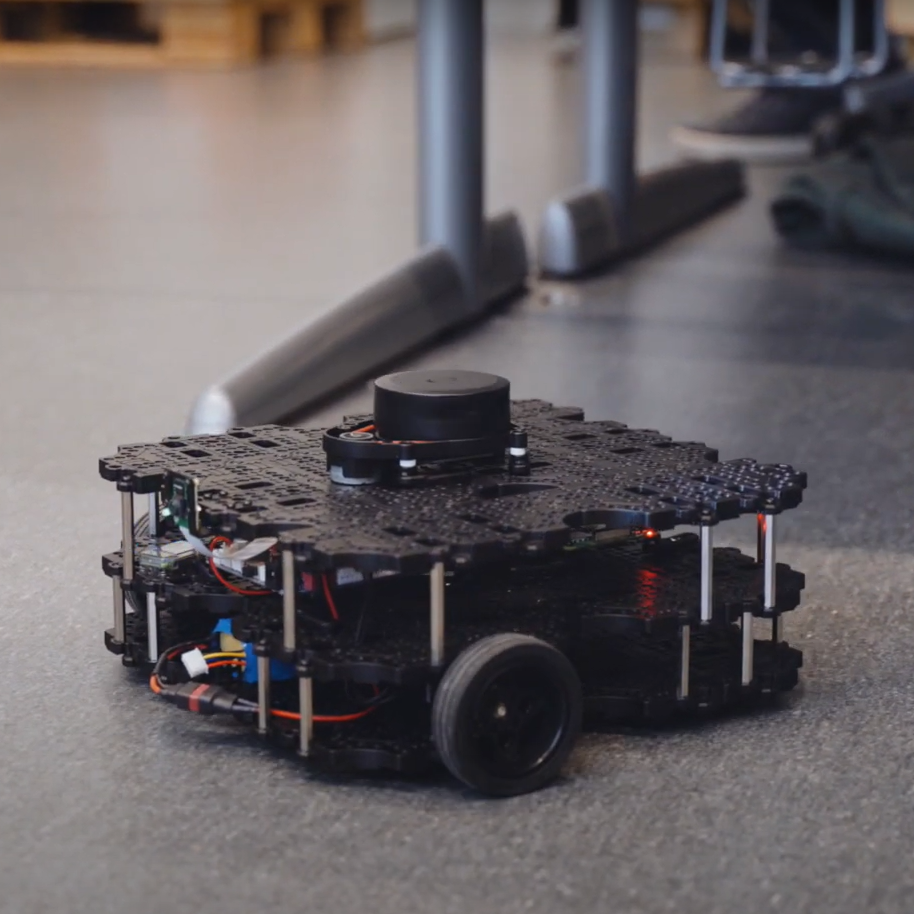
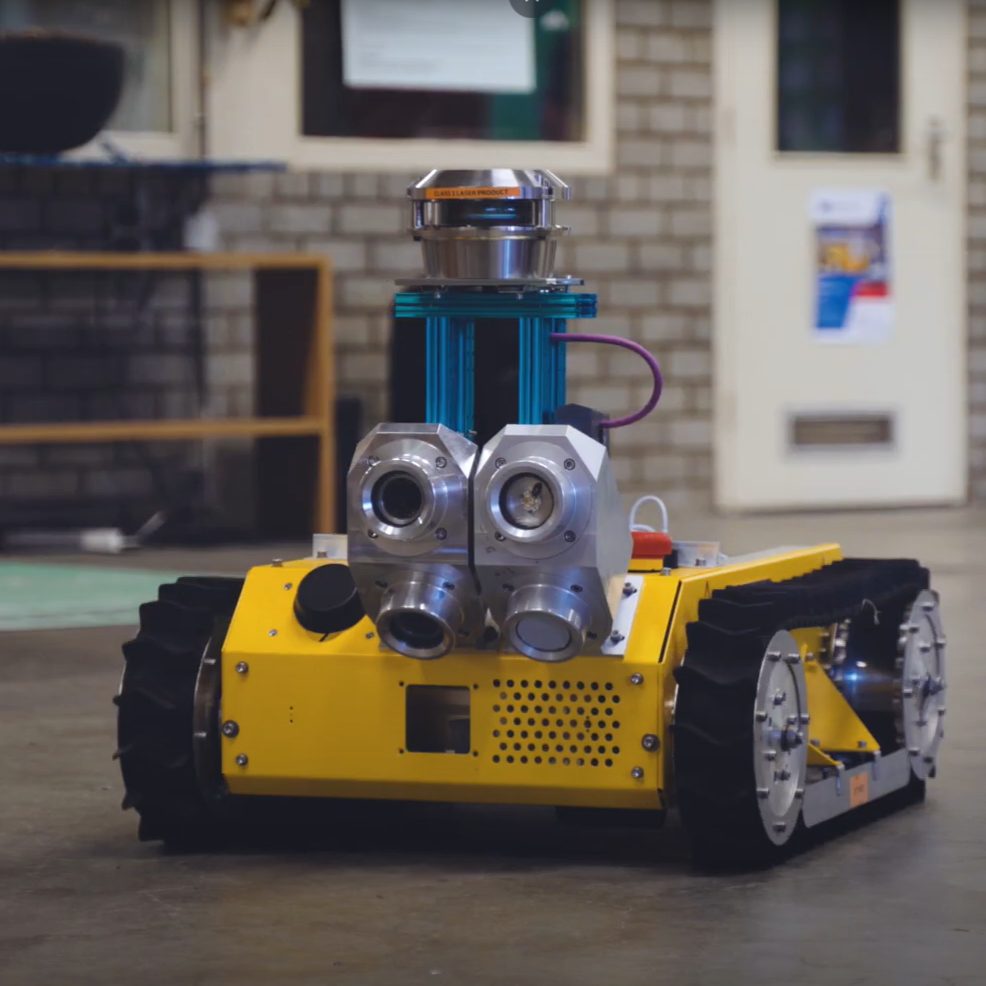
Een volgende groep heeft de opdracht teruggebracht naar een simulatieomgeving. In deze omgeving hebben ze sensoren (LiDAR) en camera toegepast. Hiernaast hebben ze een dashboard ontwikkeld met een gps-lokalisering. Het resultaat van deze simulatie kan door een volgende groep geïmplementeerd worden op de fysieke robot. Op deze manier kan de robot in de toekomst autonoom rijden.
Wat is er geleerd?
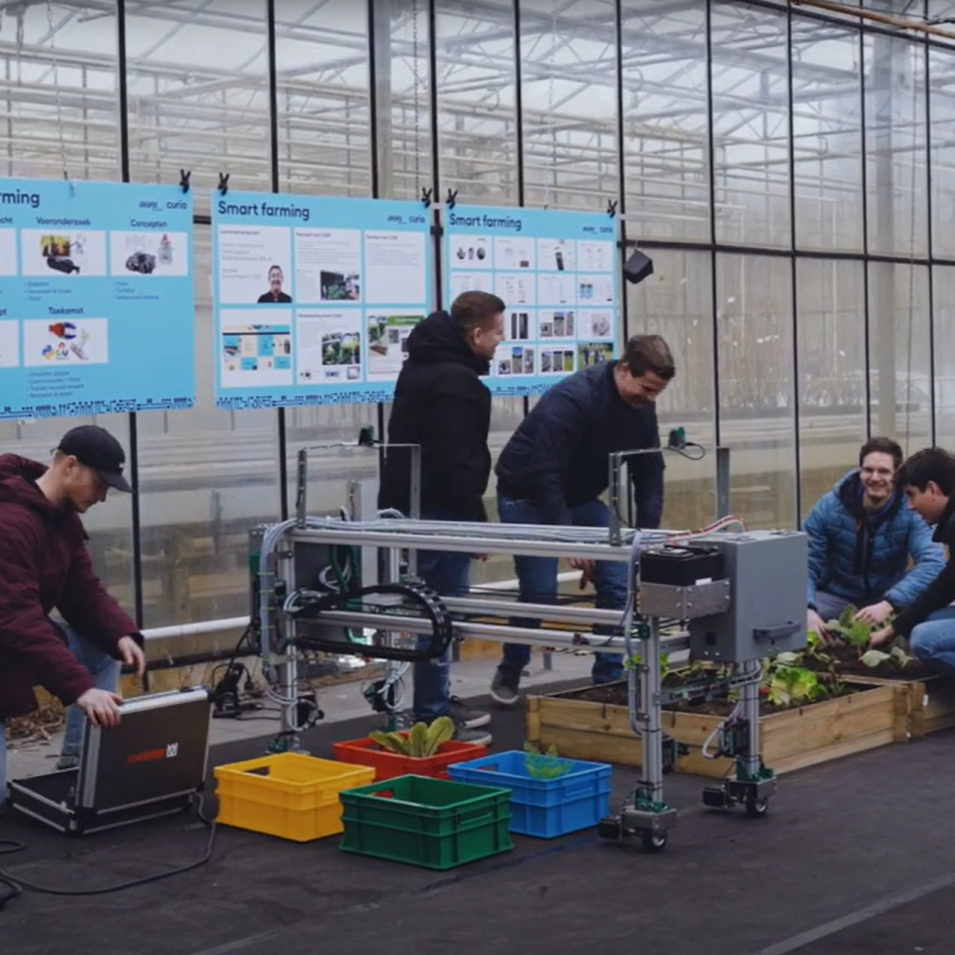
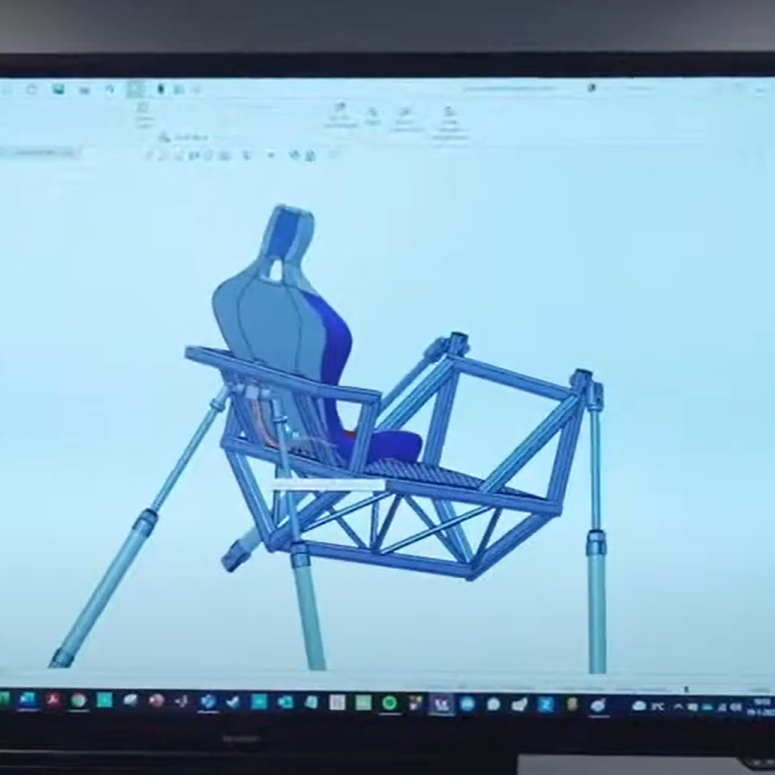
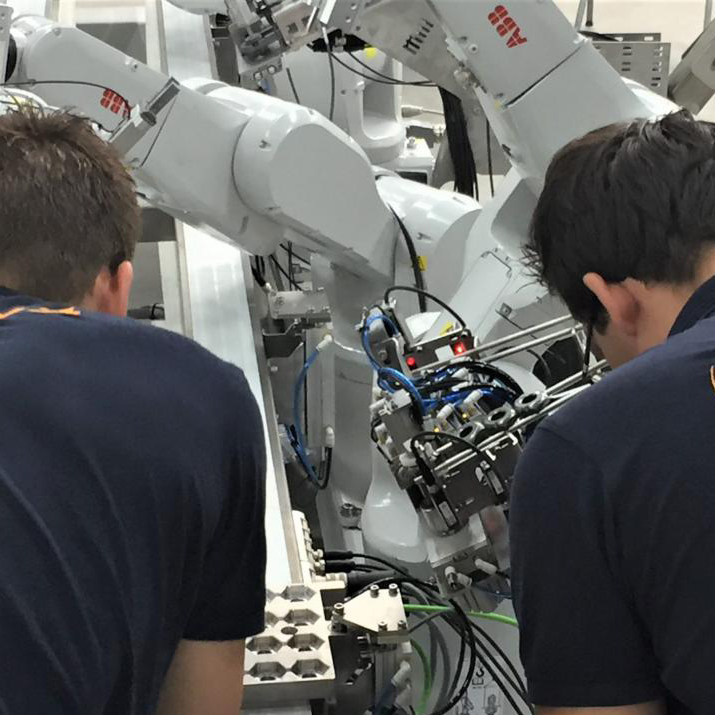
In dit project zijn studenten van Curio en Avans betrokken om een prototype te realiseren. Hierbij heeft de projectgroep zelf een analyse en ontwerp met gedetailleerde tekeningen opgesteld. De studenten hebben praktische kennis opgedaan door in de werkplaats de onderdelen te maken. Binnen het project is een mooie koppeling gemaakt tussen theorie en praktijk.