Projectinformatie
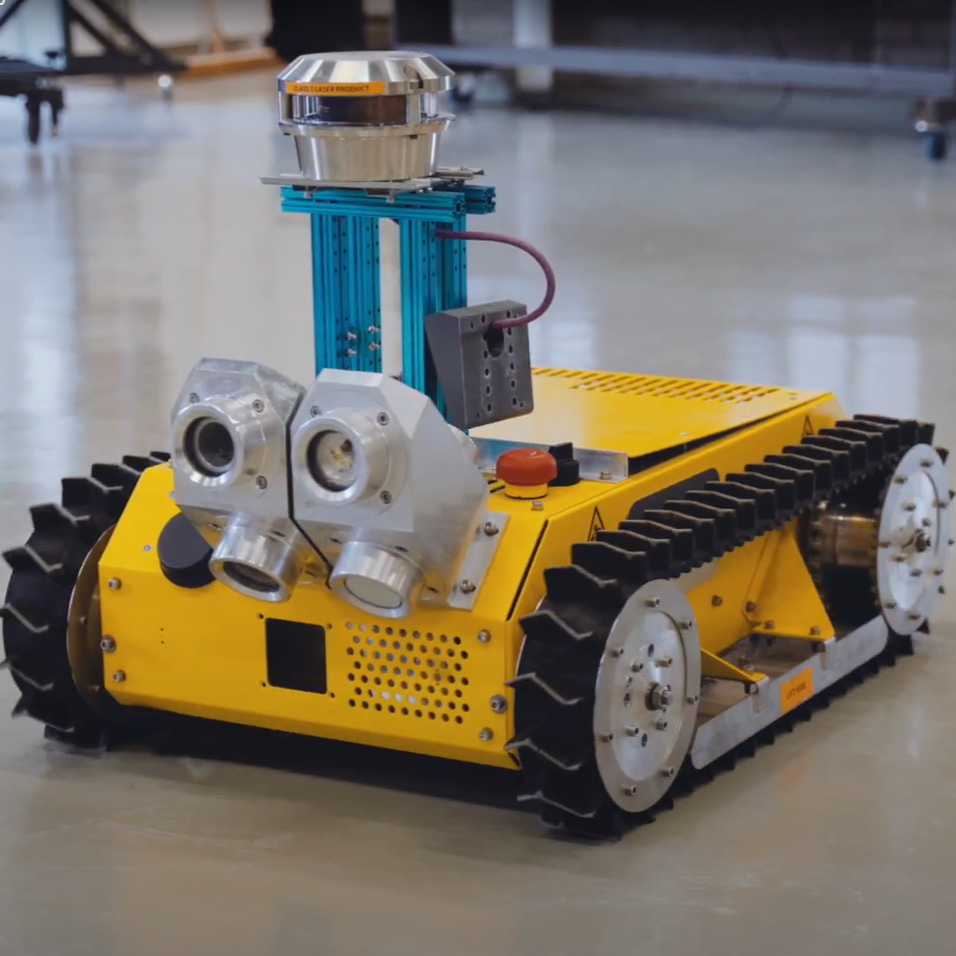
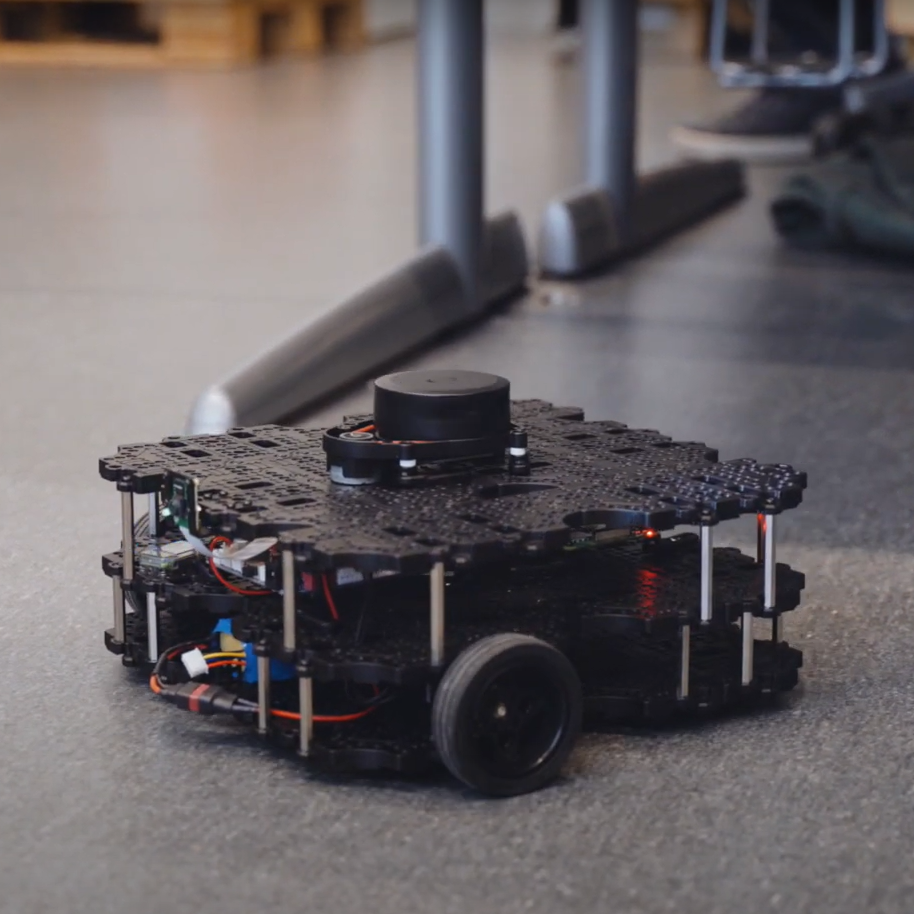
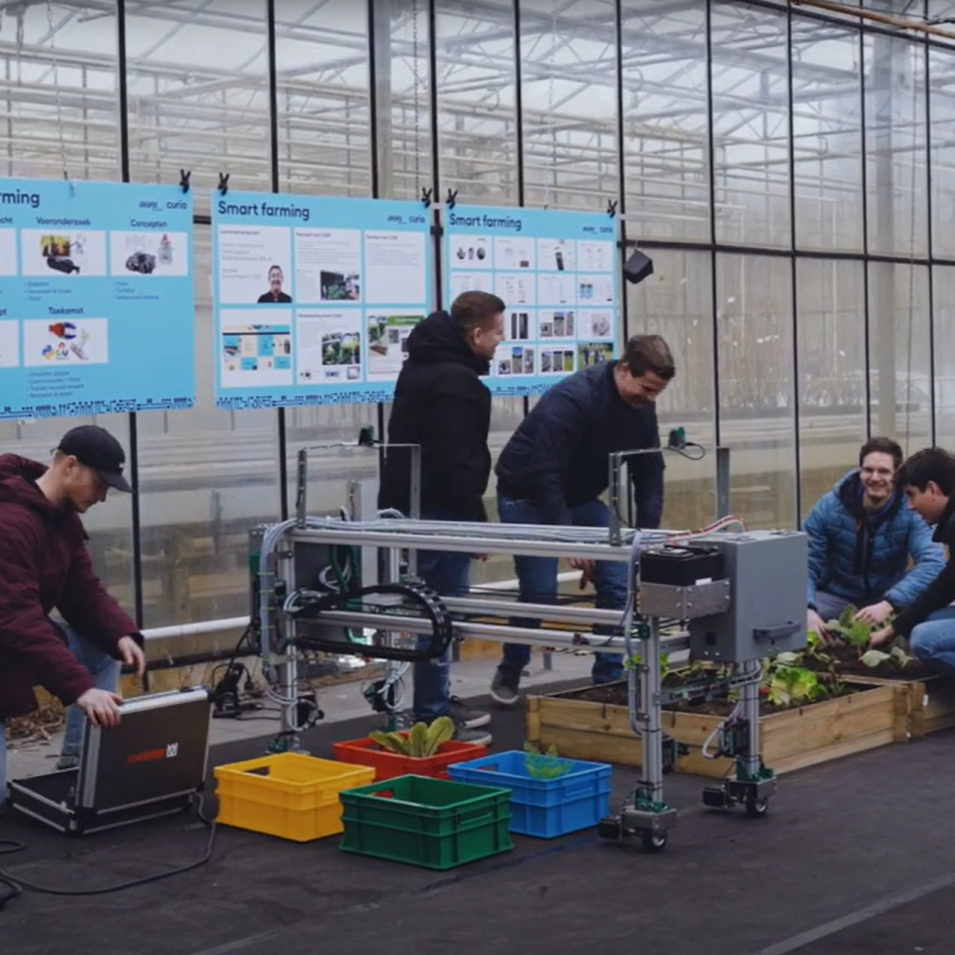
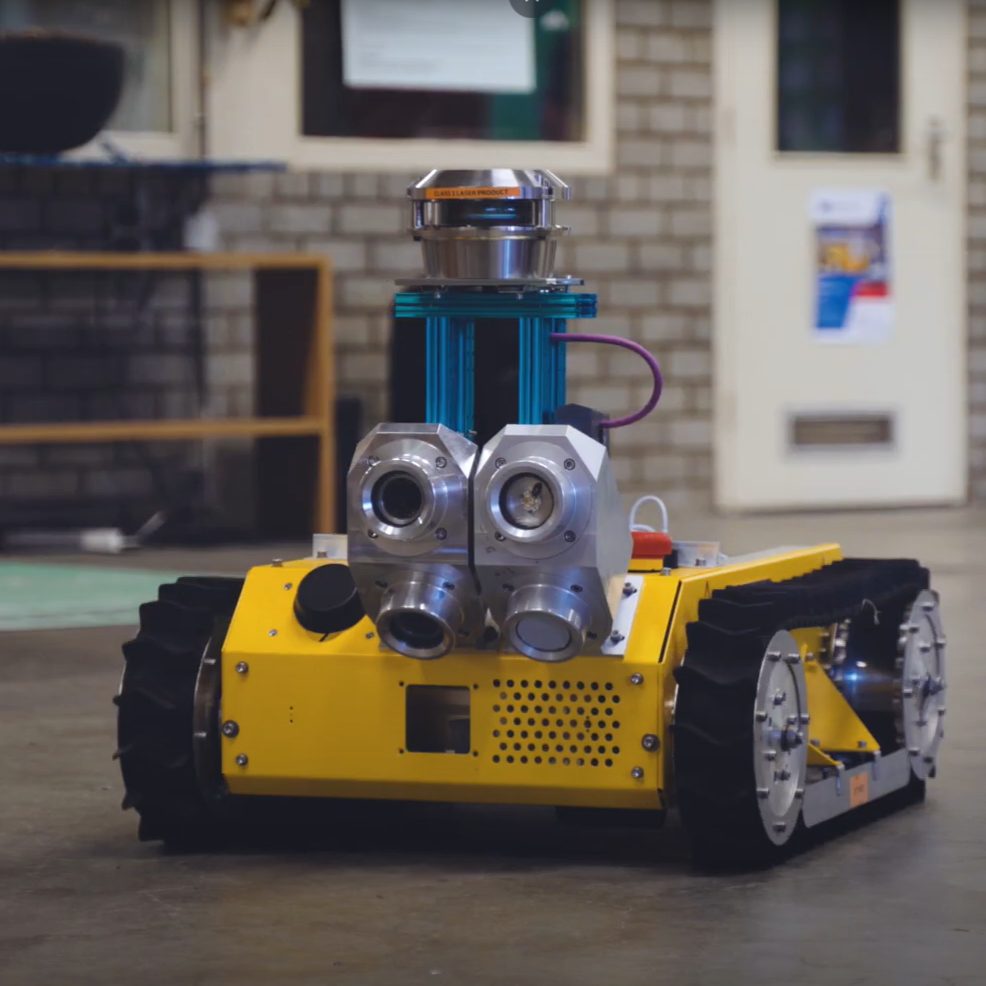
In dit project is een robot ontwikkeld die zich nauwkeurig moet kunnen positioneren door gebruik te maken van GPS. Dit project is uitgevoerd om op kleine oppervlaktes landbouw mogelijk te maken (pixelfarming). Zo werken we toe naar duurzame stadslandbouw.
Wat is er gerealiseerd?
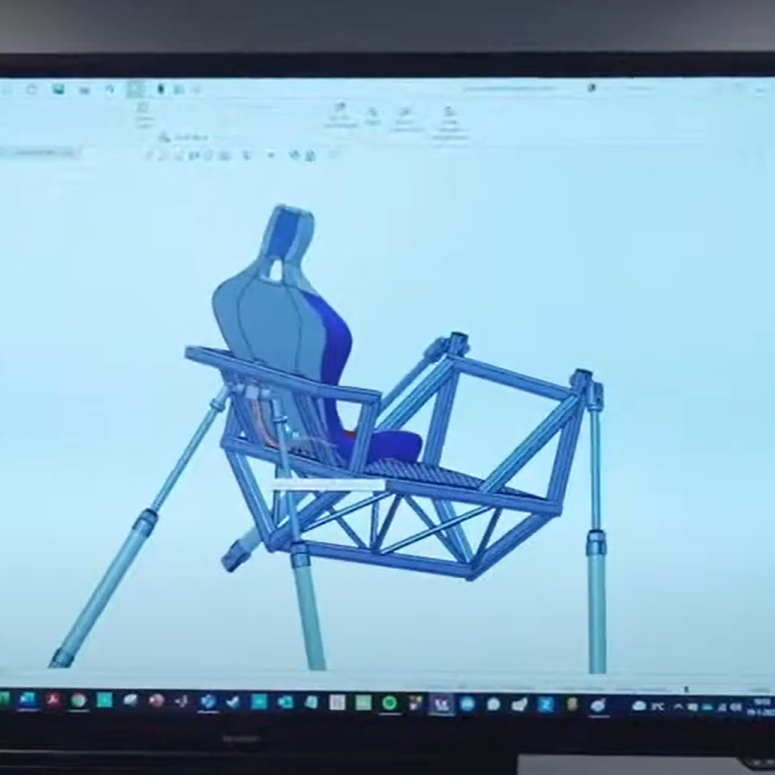
De projectgroep heeft de kans gekregen om vanaf de tekentafel te beginnen met het ontwikkelen van een robot. In het project is een wedstrijdelement verwerkt om zo snel mogelijk de robot te kunnen positioneren.
Binnen het project is gebruik gemaakt van GPS om de robot langs een route te laten navigeren. Op het frame kunnen door een volgende groep camera’s worden gemonteerd om op den duur planten en onkruid te herkennen en te verwijderen.
Wat is er geleerd?
De projectleden hebben geleerd met studenten van verschillende disciplines samen te werken. Hierbij hebben de projectleden kennis opgedaan over projectmanagement en het koppelen van navigatie software aan een robot.