Projectinformatie
In dit project is een algoritme ontwikkeld om op een compacte manier pillendoosjes in een doos te stapelen. Doel hiervan is om zo efficiënt mogelijk in te pakken.
Wat is er gerealiseerd?
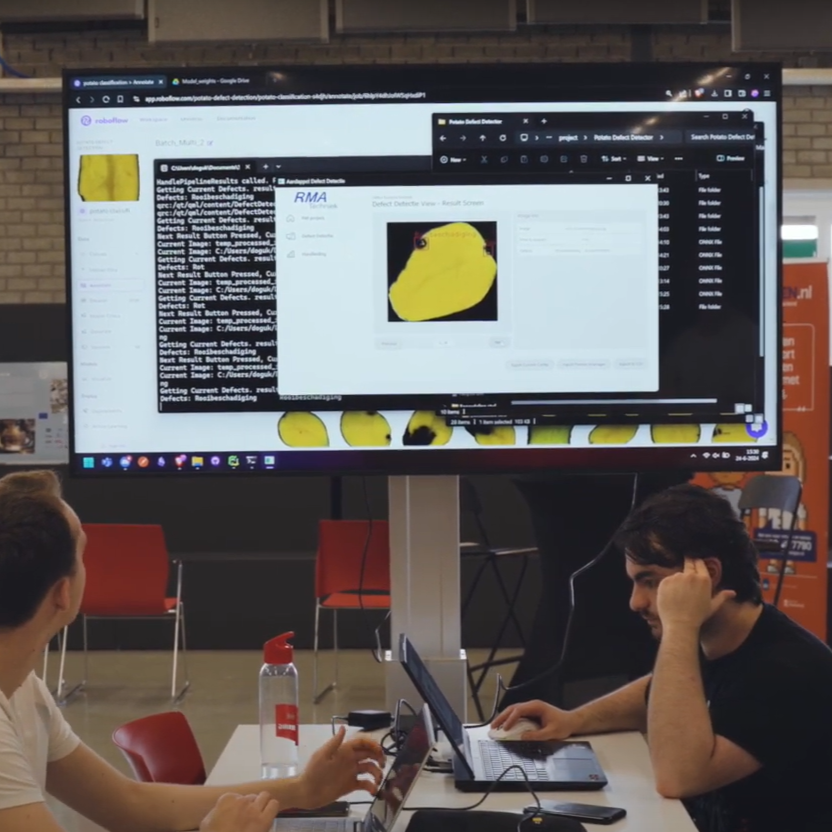
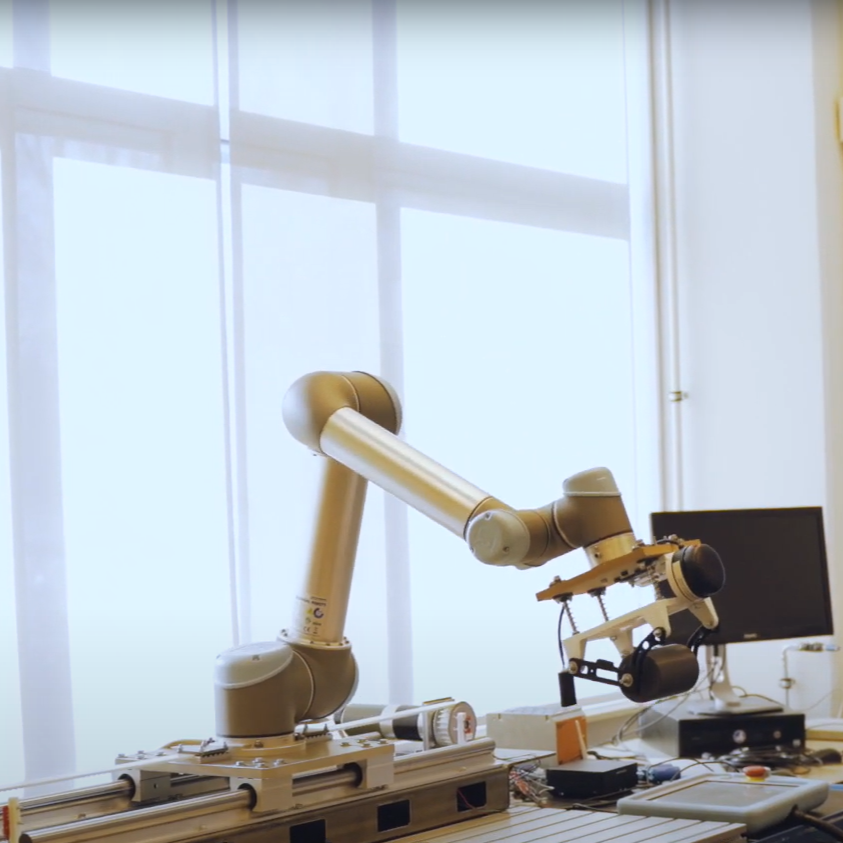
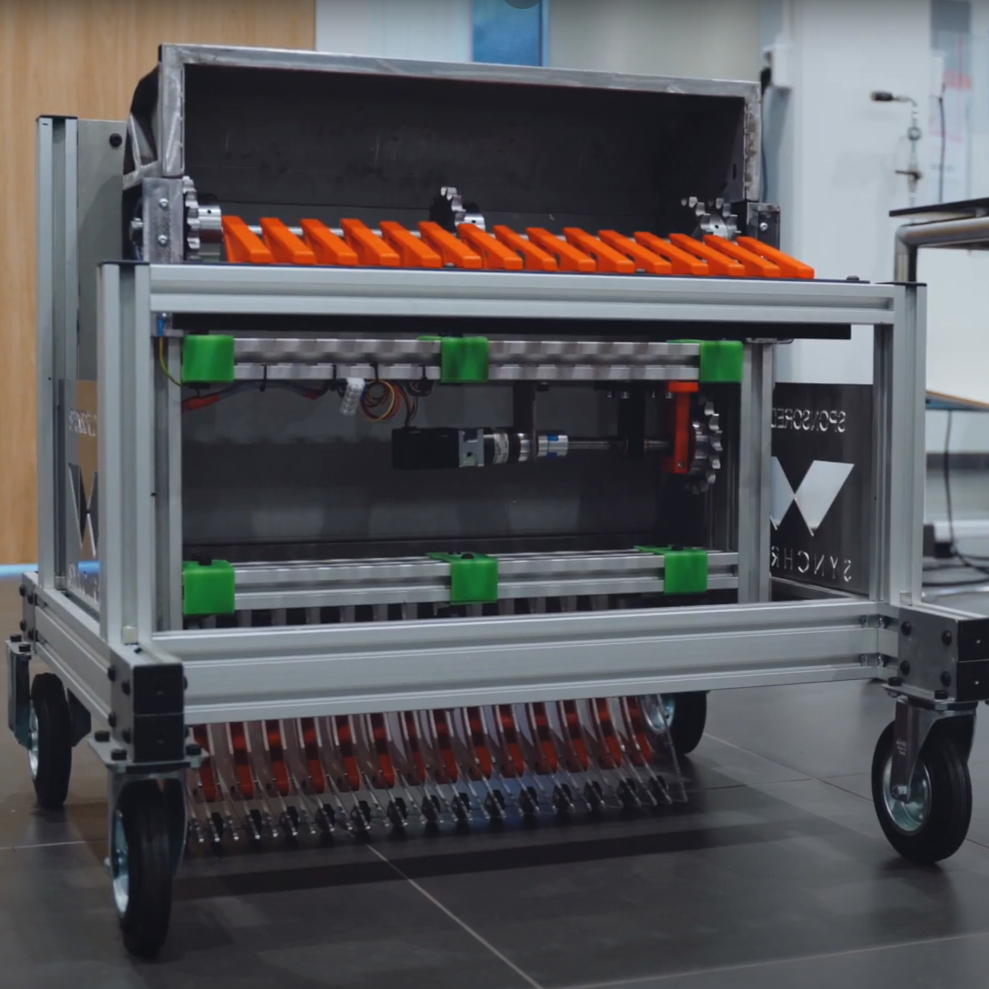
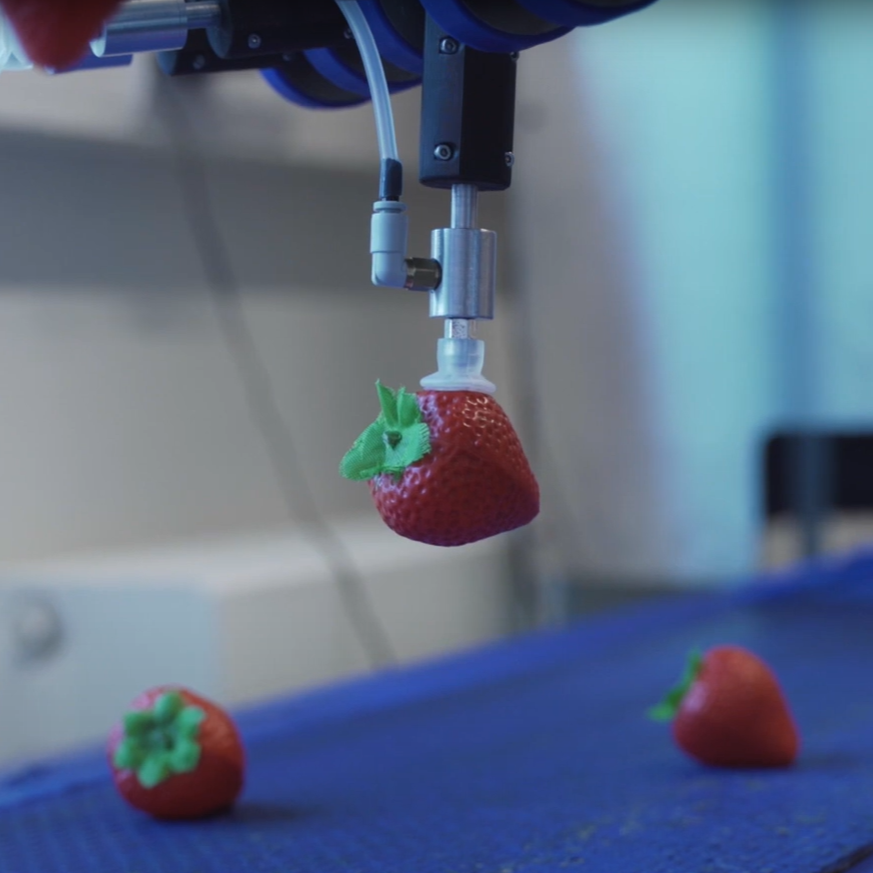
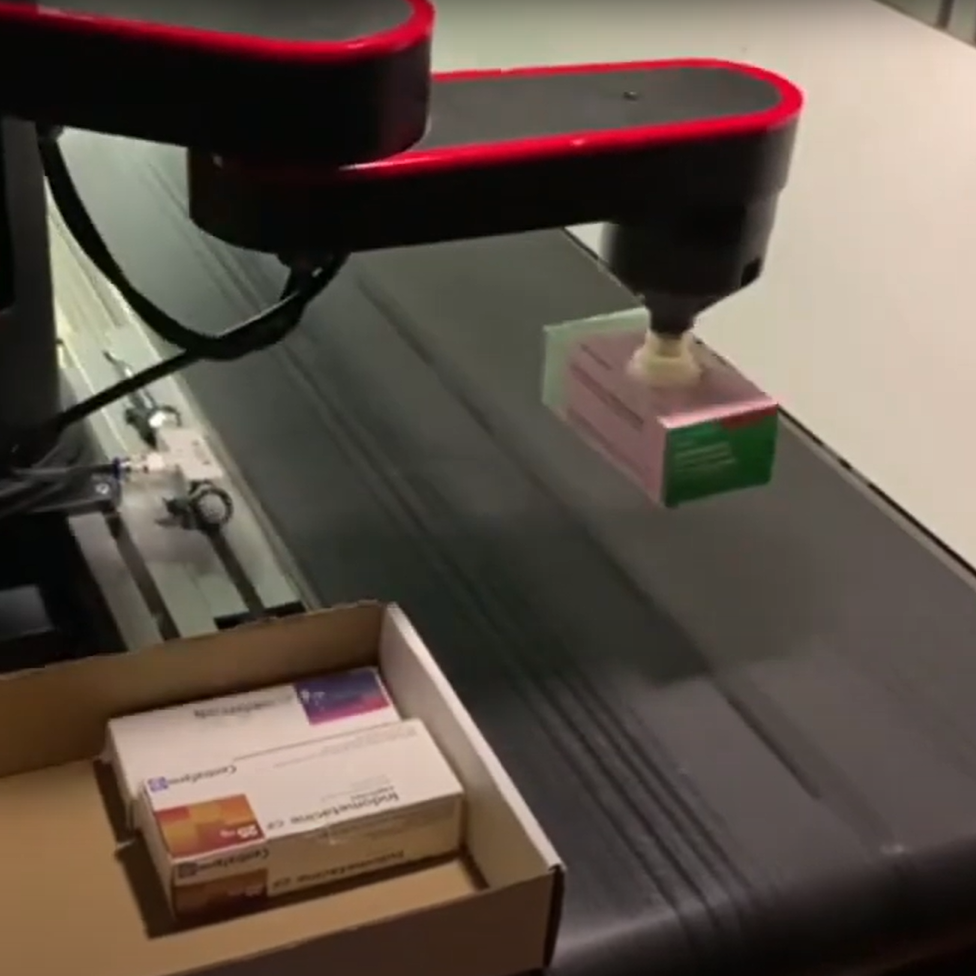
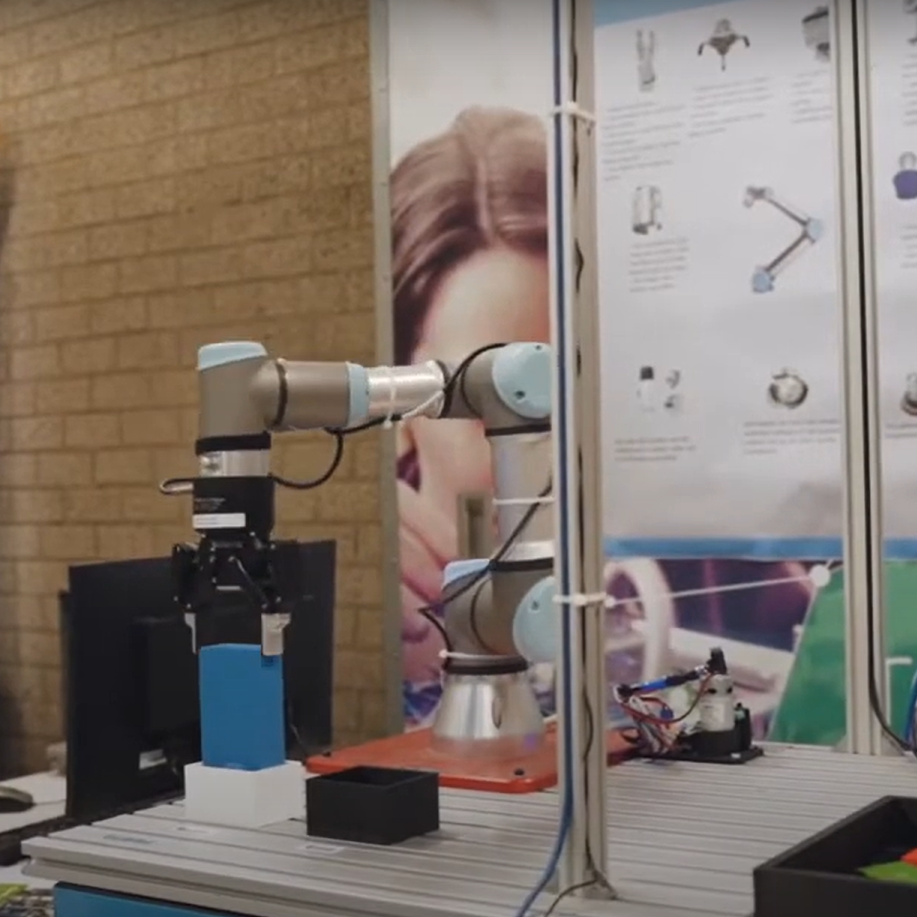
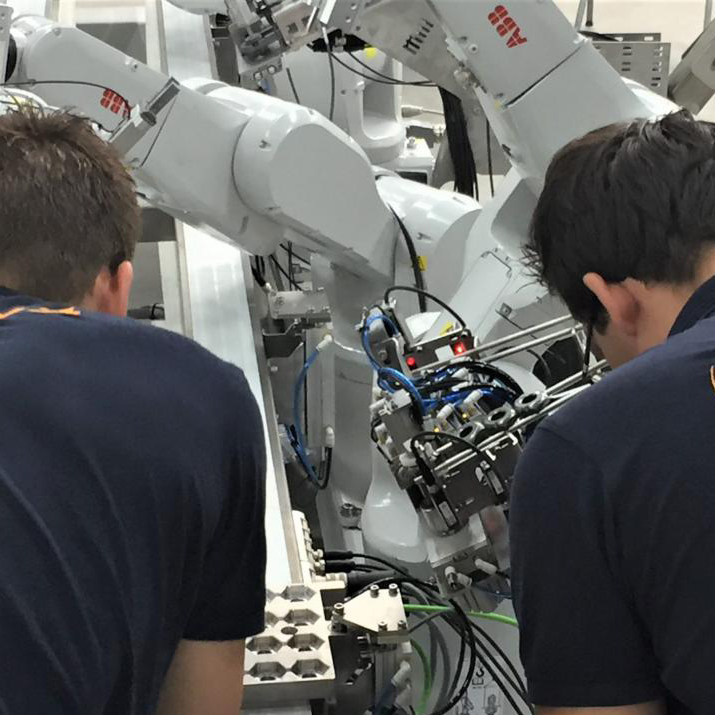
Binnen het project is een robotcel gerealiseerd, uitgerust met een robot, camerasysteem en een transportband. Bij het aanleveren van een product (het pillendoosje) wordt de transportband geactiveerd. Op moment dat het product onder de camera komt te liggen wordt de grote bepaald. Door middel van een algoritme wordt bepaald hoe het product in een grote doos kan worden gestapeld door een robot. Bij het stapelen van de producten wordt rekening gehouden met de omvang van het product, zodat er zoveel mogelijk producten in de doos passen.
Wat is er geleerd?
De projectgroep heeft geleerd hoe een robot kan worden aangestuurd door gebruik te maken van systeem vision (beeld herkenning). De studenten hebben een hoop geleerd over hoe een robot kan worden aangestuurd. Daarnaast hebben ze kennis opgedaan over algoritmes.