Projectinformatie
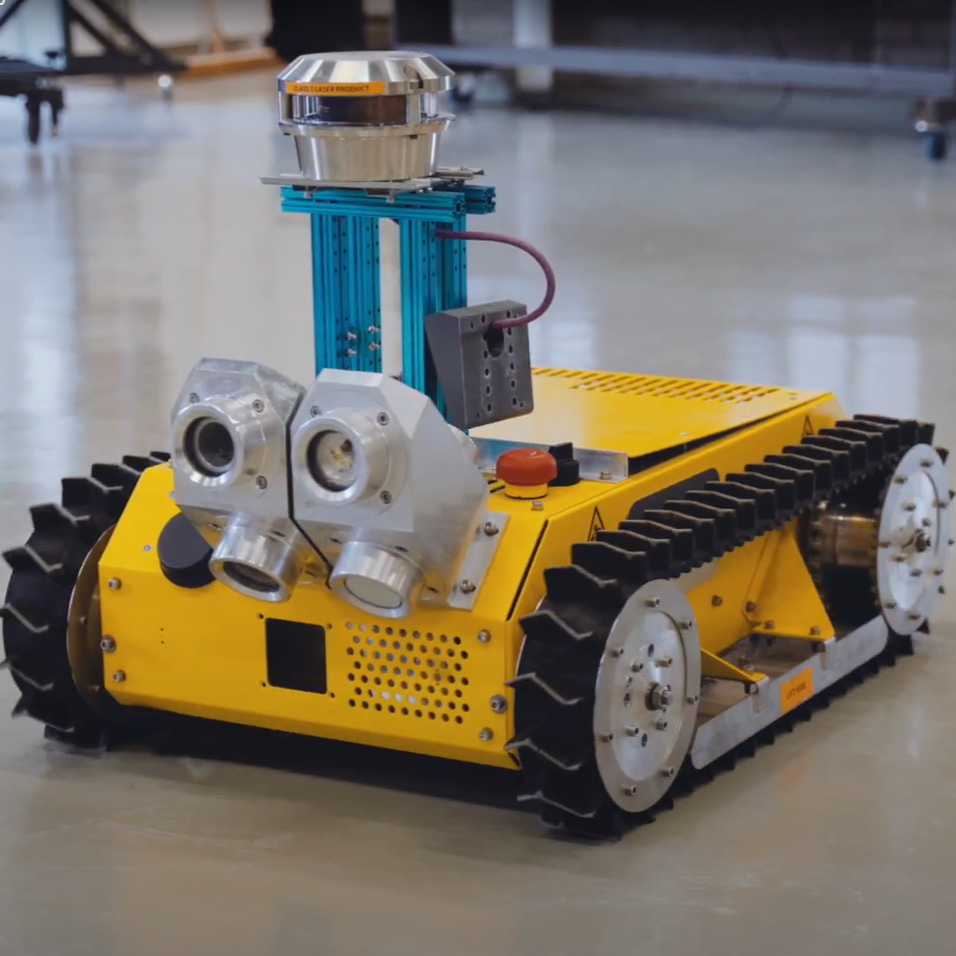
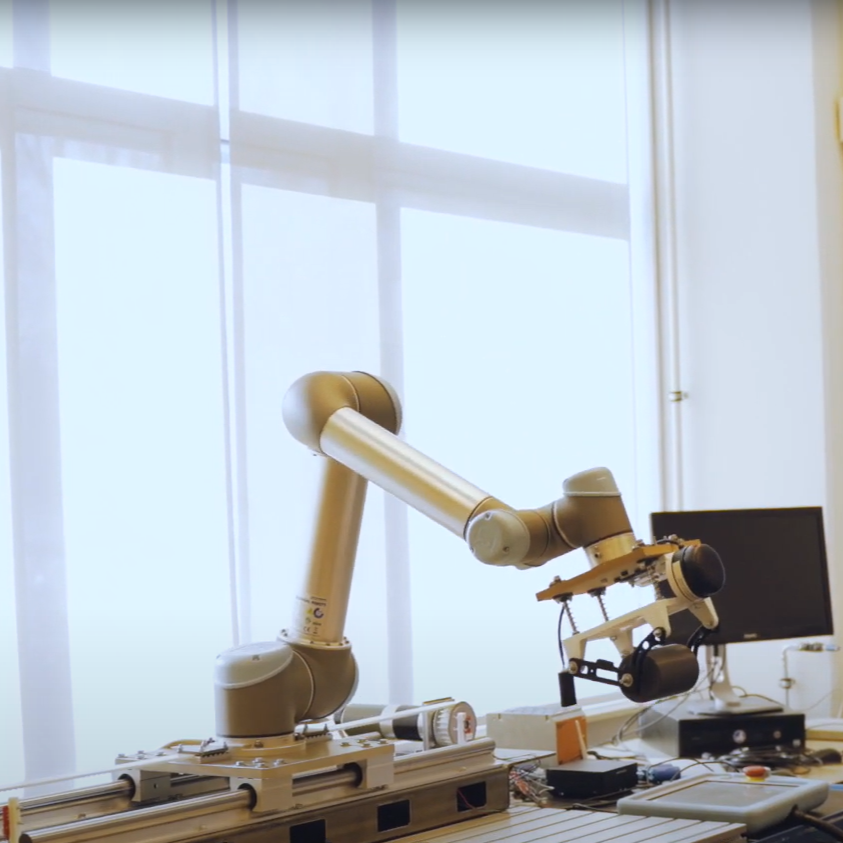
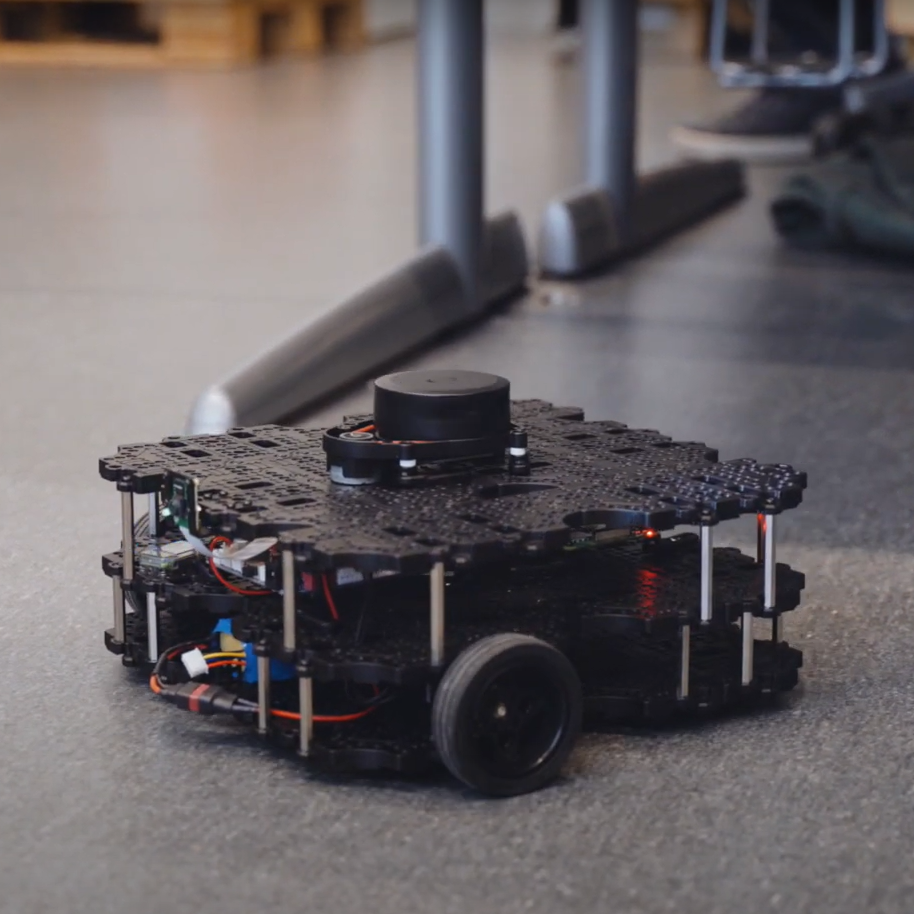
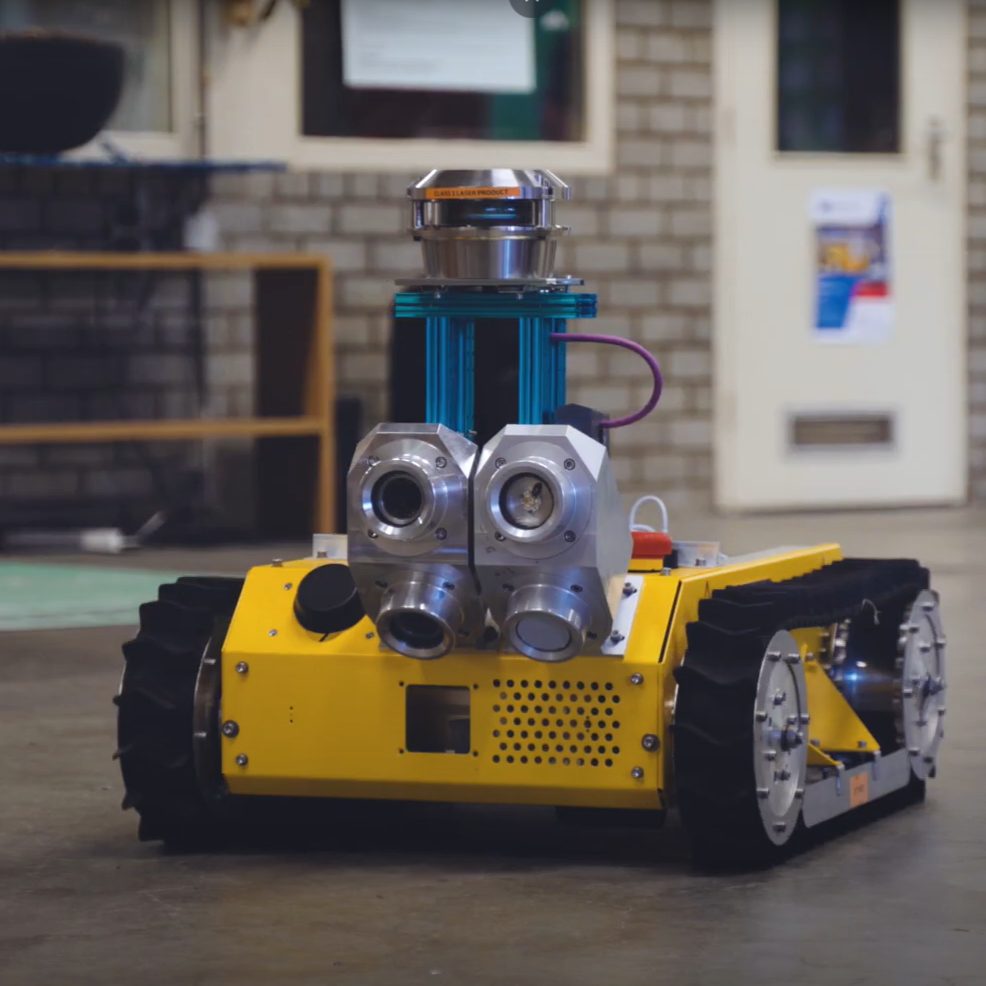
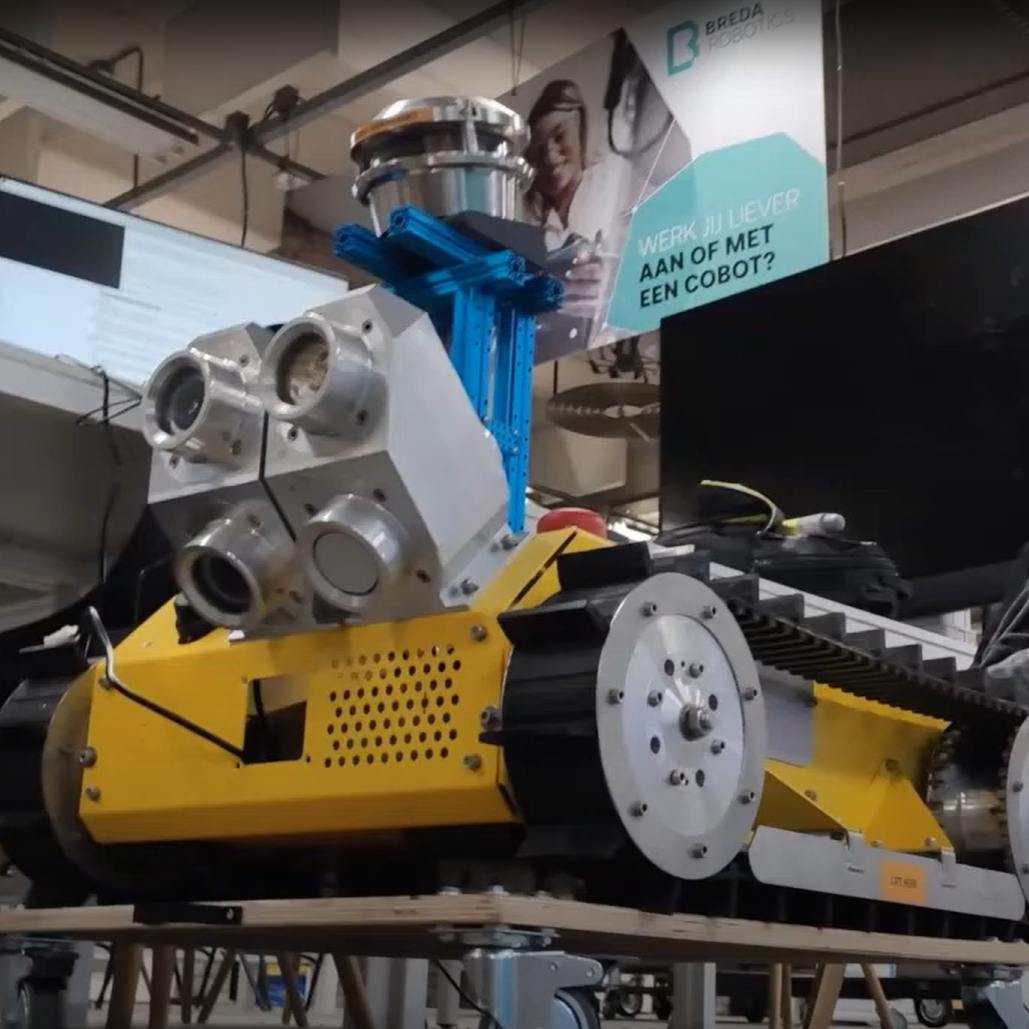
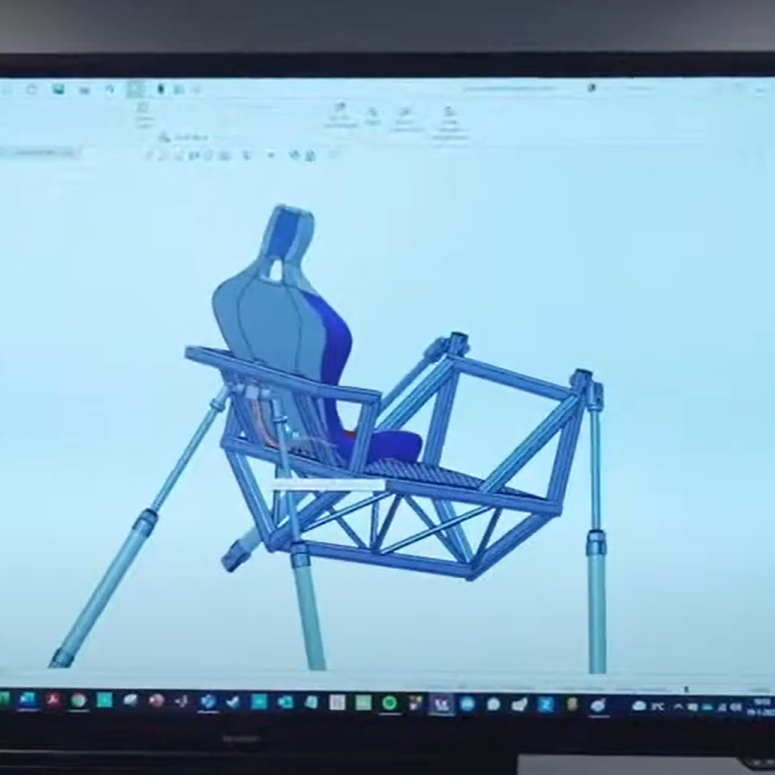
Binnen dit project is een simulatieomgeving ontwikkeld om sensoren te testen van een inspectierobot. Hierbij wordt een robot gebruikt om in explosie gevaarlijke omgevingen, installaties op gebreken te inspecteren. Door autonome inspectie toe te passen kunnen gevaarlijke situaties worden voorkomen en kan de kosten van inspecties worden gereduceerd.
Wat is er gerealiseerd?
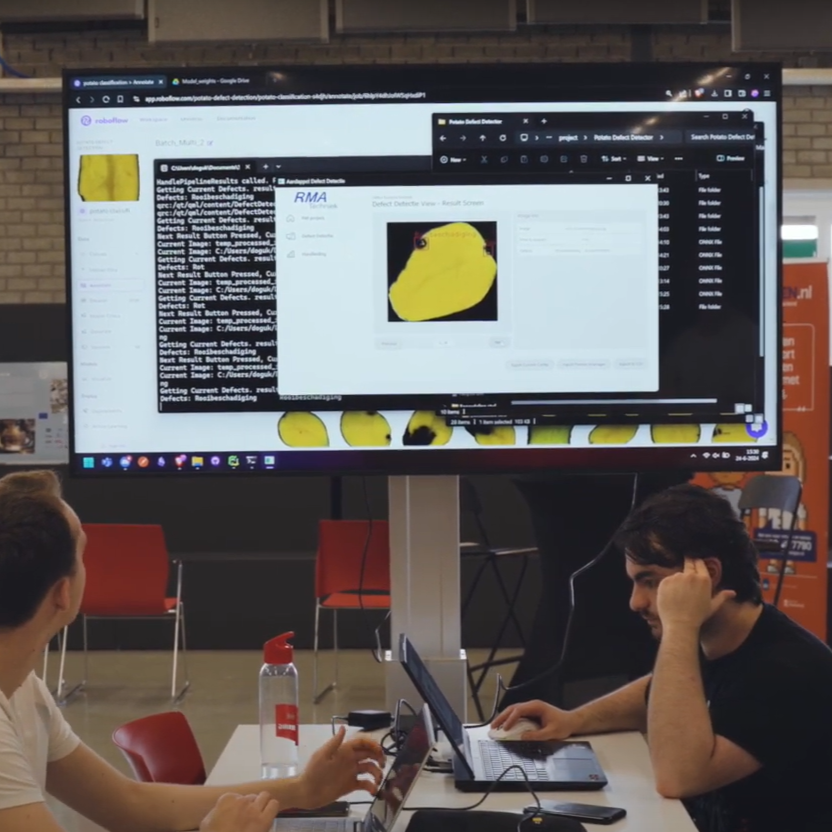
In het project is een simulatieomgeving ontwikkeld om sensoren uit te lezen van de robot EXR1. Hierbij is software opgesteld om de robot op een afstand met een controller aan te sturen. Daarnaast is een koppeling gemaakt tussen het uitlezen van de sensoren in de simulatie en de sensoren van de gebouwde robot. Hiermee kan de omgeving waarin de robot aanwezig is, real-time worden gescand op obstakels.
Wat is er geleerd?
Binnen dit project zijn studenten van verschillende studies samengekomen om een inspectierobot te ontwikkelen. Hierbij was samenwerking een belangrijk onderdeel tussen de studenten met verschillende achtergronden. Door een duidelijk projectplan op te stellen en vooronderzoek te doen hebben de studenten nieuwe vaardigheden geleerd. De projectgroep heeft veel geleerd over hoe een simulatieomgeving kan worden geïntegreerd met de echte wereld.