Projectinformatie
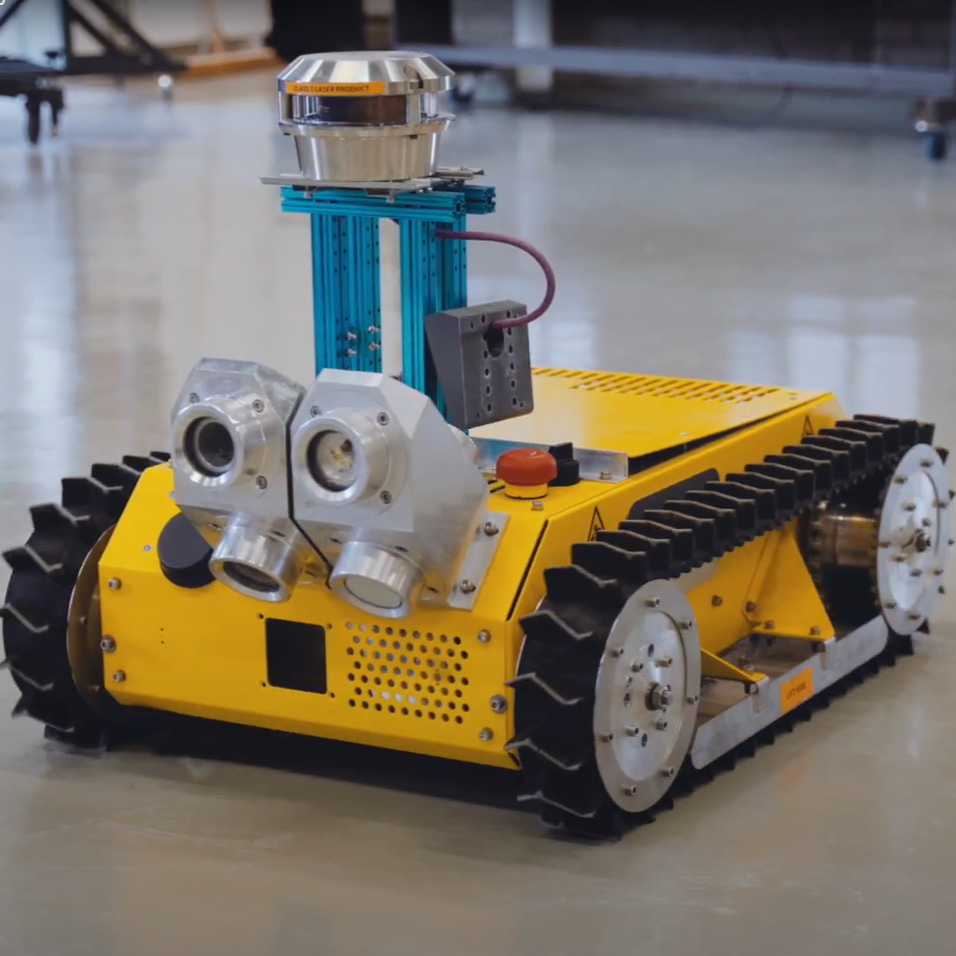
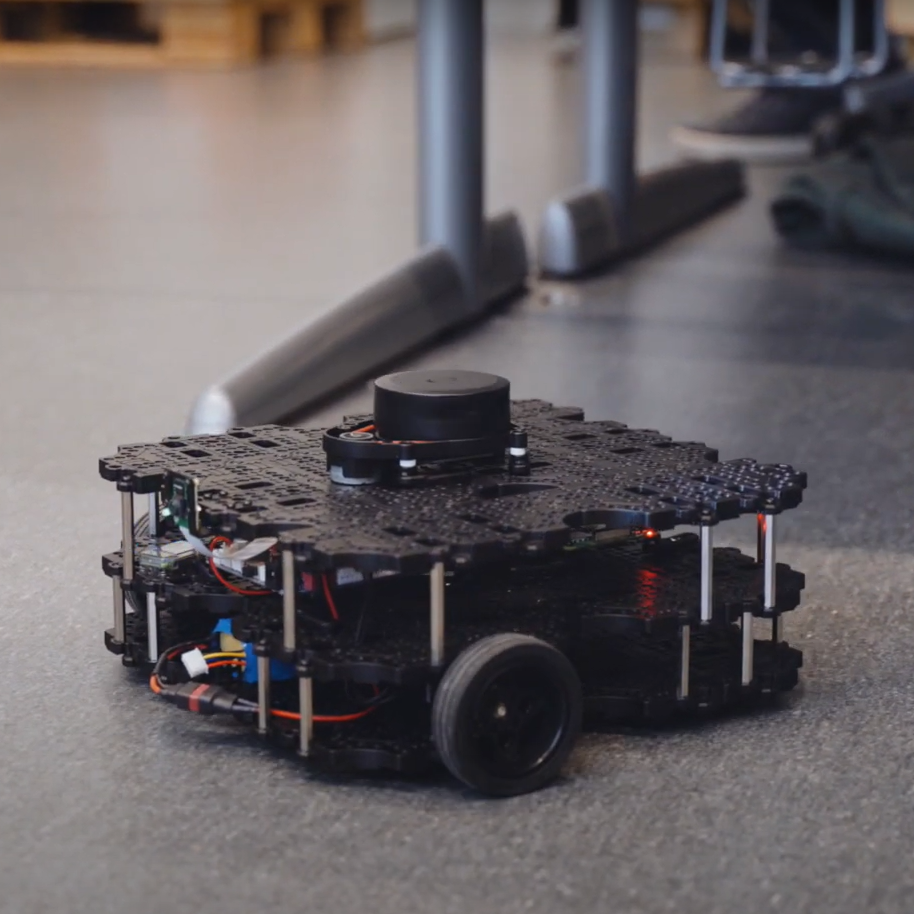
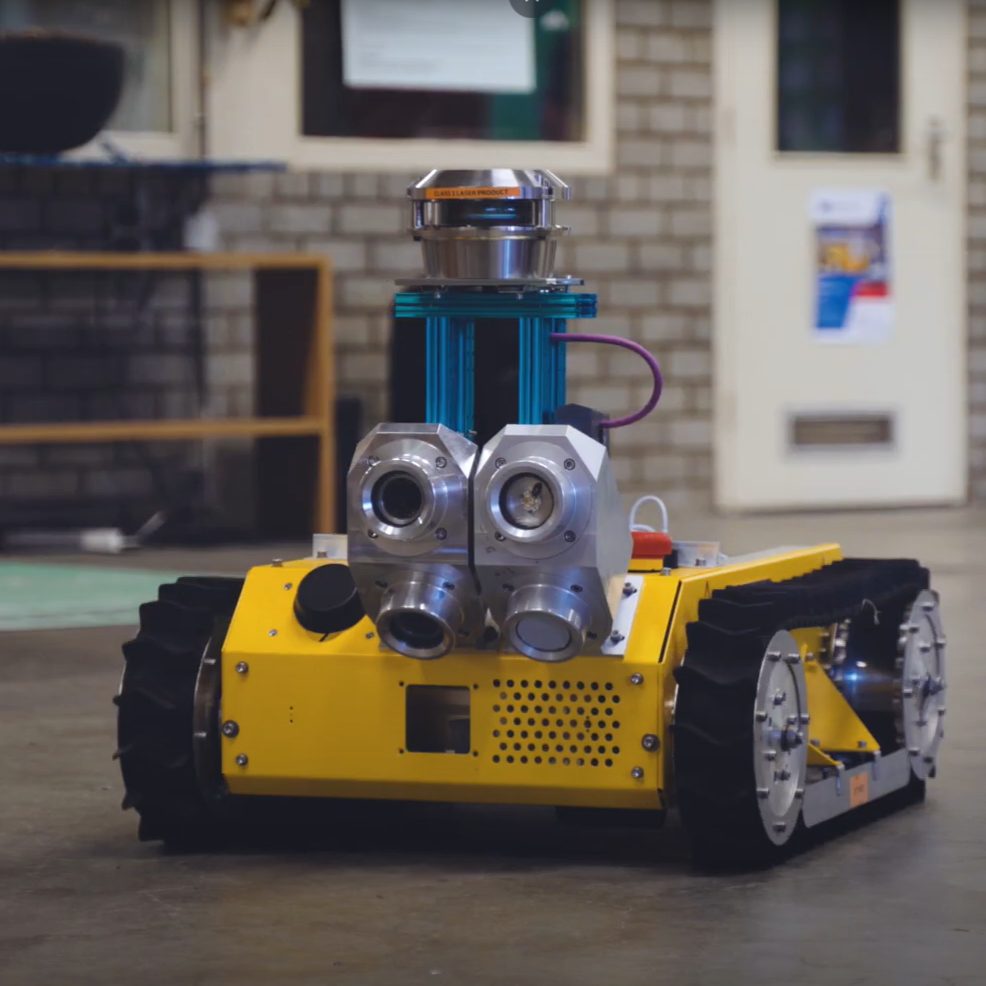
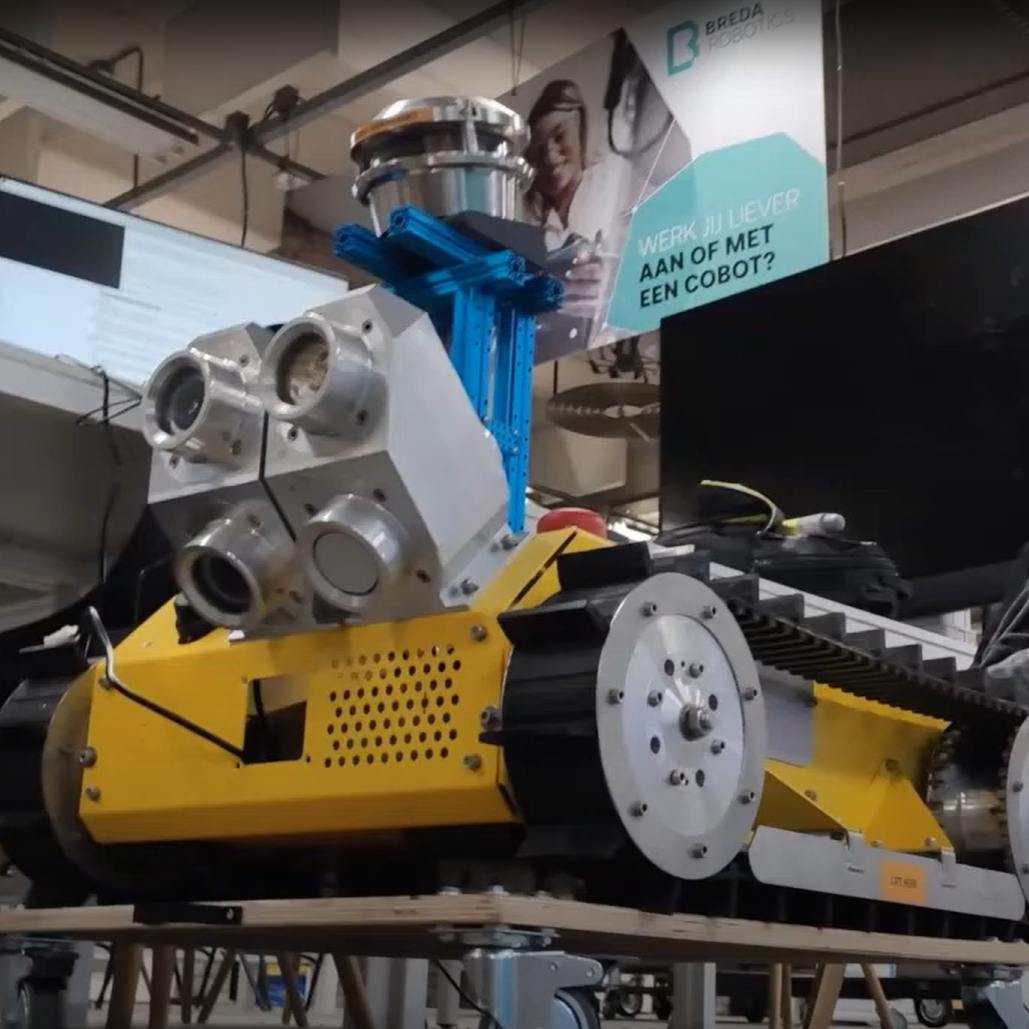
In dit project is autonome navigatiesoftware ontwikkeld voor een inspectie robot. Een inspectie robot wordt gebruikt in explosie gevaarlijke omgevingen, om installaties op gebreken te inspecteren. Door autonome inspectie toe te passen worden gevaarlijke situaties voorkomen en kunnen de kosten van inspecties worden gereduceerd.
Wat is er gerealiseerd?
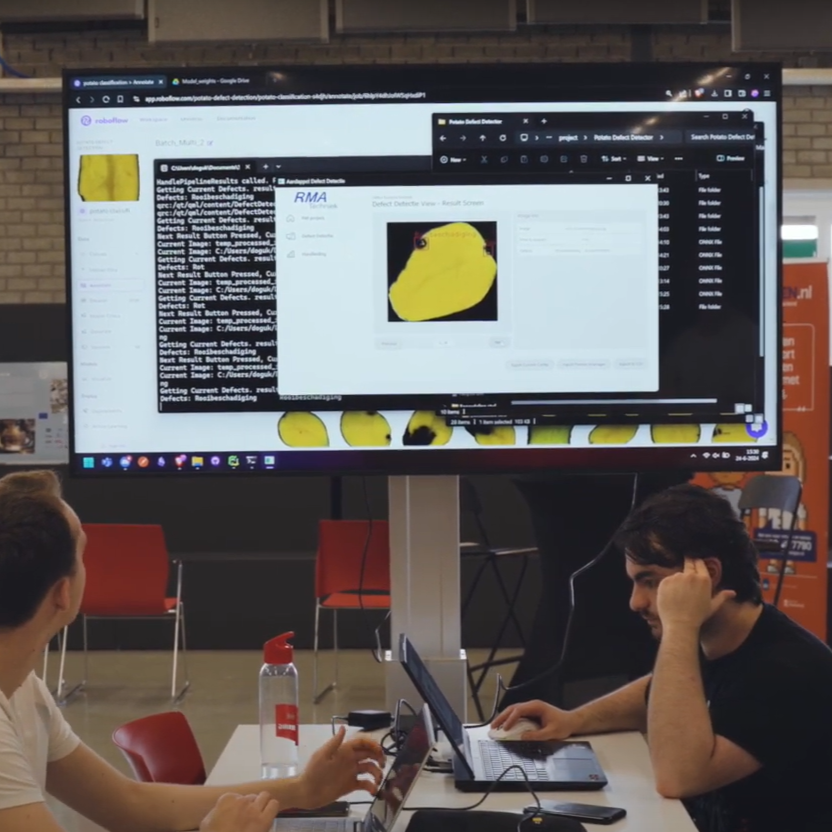
In het project zijn verschillende sensoren gebruikt om informatie uit de omgeving te detecteren. Deze informatie (zoals obstakels in de ruimte en de locatie van machines) wordt vervolgens zichtbaar gemaakt voor de operator in een plattegrond.
De ontwikkelde navigatiesoftware zorgt ervoor dat de robot met de input van de sensoren een route kan generen en deze route kan volgen, waarbij de robot autonoom om obstakels heen navigeert.
Wat is er gerealiseerd?
In het project zijn verschillende sensoren gebruikt om informatie uit de omgeving te detecteren. Deze informatie (zoals obstakels in de ruimte en de locatie van machines) wordt vervolgens zichtbaar gemaakt voor de operator in een plattegrond.
De ontwikkelde navigatiesoftware zorgt ervoor dat de robot met de input van de sensoren een route kan generen en deze route kan volgen, waarbij de robot autonoom om obstakels heen navigeert.
Wat is er geleerd?
De projectgroep heeft geleerd wat er nodig is om een robot autonoom te laten navigeren. Daarnaast is vooral kennis opgedaan over samenwerken in een team en met een klant. Vragen als ‘Hoe ga je om met veranderingen binnen je project’ en ‘Hoe communiceer je met de klant’ kwamen hierbij aan de orde.